Implantation d`une commande à structure variable pour un

Implantation d'une commande
à structure variable
pour un actionneur
m la,
piézoélectrique associé
m
à un microscope à effet tunnel
Mots clés
Actionneurs
piézoélectriques,
Commande à
structure variable,
Microscope
à effet tunnel.
Nanotechnologie.
Par N. Bonnail*, D. Tonneau*, H. Dallaporta*, GA Capolino**
* Faculté des Sciences de Luminy, GPEC
** Université de Picardie Jules Verne - CREA
Les actionneurs piézoélectriques viennent remplacer les structures
électro-magnétiques classiques dans toutes les applications où le
positionnement précis est indispensable. Le but de cet article est
de montrer les étapes du développement d'une commande originale
pour le positionnement nano-métrique adapté à la microscopie
en champ proche.
1. Introduction
Les céramiques piézoélectriques [1] sont aujourd'hui
couramment utilisées dans les systèmes de déplacement
linéaire lorsqu'une résolution sub-micronique est
recherchée. Ces céramiques sont l'élément essentiel des
microscopes à effet tunnel [2], utilisés pour la visualisation
de surfaces conductrices sur des fenêtres d'observation
ajustables dans le domaine de 1 nm2 à 10 p ml. Le principe
de fonctionnement de ces microscopes est basé sur la
L'E S S E N T 1 E L
. Les céramiques piézoélectriques permettenl
. Les céramiques piézoélectriques permettent un contrôle de
déplacements linéaires avec une sensibilité nanométrique
non atteignable avec les systèmes mécaniques
conventionnels. Ce travail présente le contrôle d'une
céramique piézoélectrique, par une Commande à Structure
Variable (CSV), pour des déplacements nanométriques. Afin
de réaliser ces mesures de déplacement avec cette
résolution, nous avons utilisé le principe de l'effet tunnel,
principe couramment utilisé dans les microscopes à effet
tunnel. La modélisation et l'identification du système ont
permis d'en déterminer les variables pertinentes pour
l'implantation de la commande. La validation expérimentale
de cette commande a été effectuée en étudiant sa réponse en
poursuite et en régulation
mesure et le contrôle du courant tunnel circulant entre une
pointe-sonde et la surface à étudier. La pointe est fixée à
un ensemble d'actionneurs piézoélectriques permettant son
déplacement parallèlement et perpendiculairement au plan
de l'échantillon.
Les électroniques de pilotage de microscope à effet
tunnel comportent donc un capteur pour la mesure du
courant tunnel et une boucle de régulation de ce courant.
Les régulations commerciales couramment utilisées sont
SYNOPSIS
. The piezoelectric actuators allow to controllinear motion
with accuracy in the nanometer range being impossible to be
reached by conventional electromechanical devices. This
paper presents the control of a piezoelectric actuator for
accurate linear displacements within the nanometer range by
means of a Variable Structure System (VSS). In order to
perform the measurement of the motion length, the principle
of tunnelling effect has been used as it is in the scanning
tunnelling microscopes. The system model and identification
have permitted to determine the key parameters for the
control implementation. The experimental validation of the
control law has been performed using classical criteria for
tracking and regulation performances.
REE
Février -1002
1

m Dossier)
ÉLECTROTECHNIQUE DU FUTUR
essentiellement basées sur l'utilisation d'un correcteur
proportionnel et intégral dont le réglage empirique par
l'opérateur nuit à la reproductibilité du procédé d'imagerie.
De plus, ces microscopes sont également pressentis
pour être utilisés par l'industrie de la micro-électronique
comme outil de lithographie à haute résolution pour l'éla-
boration de dispositifs électroniques de la prochaine
génération. La réalisation de ces dispositifs nécessite le
contrôle des états transitoires de la boucle de régulation en
position de la pointe [3]. La détermination d'une
commande adaptée nécessite la connaissance du système
à réguler.
Le but de cet article est de présenter, après un rappel
détaillé du fonctionnement d'un microscope à effet tunnel,
l'implantation et la validation d'une Commande à Structure
Variable (CSV) à partir de la connaissance d'un modèle du
système. Le modèle a été établi à partir d'une identification
du système et à fait l'objet d'un autre article [4]. Le concept
de commande d'un microscope à effet tunnel par CSV a été
validé en mesurant la réponse du système régulé à un
échelon de la valeur de consigne.
2. Présentation d'un microscope à effet
tunnel
V, +' !'V
'l lue
m.t " "
r
.1, f'',, MoW ur
z, I
IT+Aij
P,,inte
I t
Jn l i
_ __.Pointe
'\'dd/ : J.v'I ; "
I+d
",. V ;
,' _._fch :) nui] on y./
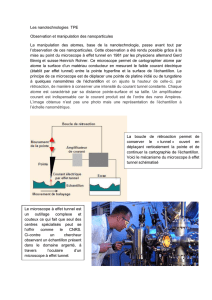
Figure 1. Schéma d'un microscope à effet tunnel.
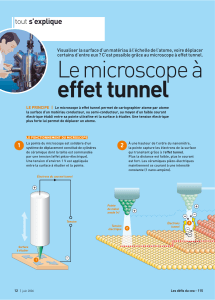
Le principe du microscope à effet tunnel repose sur la
mesure et le contrôle du courant tunnel Ir apparaissant
entre une pointe sonde et la surface à étudier, lorsque la
pointe est approchée de la surface polarisée par une tension
Vs à une distance d de l'ordre du nanomètre. Le courant
tunnel est mesuré à l'aide d'un capteur consistant en un
convertisseur courant tension de haut gain (108 V/A) de
sortie VT et relié à la pointe du microscope à effet tunnel.
La pointe sonde est fixée à une céramique piézoélectrique
Z permettant la commande de son déplacement perpendi-
culairement à la surface (Fig. 1) avec une sensibilité de
l'ordre de 0,01 nm. La dépendance exponentielle du
courant tunnel avec la distance pointe-échantillon assure la
sensibilité de la mesure. Cet ensemble est positionné sur
une autre céramique permettant le déplacement de la pointe
dans le plan [X, Y] de la surface. L'image de la densité
électronique de surface est obtenue en mesurant en chaque
point de la surface, la tension de commande V z à appliquer
1
REE
N'2
Février 2002
à l'actionneur piézoélectrique Z pour maintenir le courant
tunnel à une valeur de consigne/y* fixée par l'opérateur.
Pendant le balayage de la surface par la pointe du micro-
scope à effet tunnel, l'électronique de pilotage maintient,
via une boucle de régulation, le courant tunnel à sa valeur
de consigne.
Par la suite, nous nous attacherons à l'étude de la boucle
de régulation du courant tunnel. Celle ci comporte la
céramique piézoélectrique (actionneur) un ensemble pointe
convertisseur courant-tension (capteur) dont la sortie est
l'image de la distance pointe-échantillon.
3. Modélisation et représentation d'état
du système
3.1. Modélisation
Le schéma bloc de l'ensemble modélisé comprend les
trois parties principales précédemment citées (Fig. 2) : la
céramique piézoélectrique [5], la pointe et la loi du courant
tunnel [4].
Distance
Céramiyuc pomte surlacc
_.. Dstinit ,-Distance
J,, ",' "
1 u 0 0 oti It lutitici
Courant
tunnel
Tcnsion
---- Echantillon
de ce 1 1
piézoélectrique cértuniyue1 P " te
il
Figure 2. Schéma bloc de la chaîne directe.
La modélisation de la céramique piézoélectrique a été
réalisée en utilisant un schéma électromécanique
équivalent de Mason [6]. La pointe, constituée d'un fil de
125 um de diamètre maintenu à une extrémité, possède un
mode de vibration transverse que l'on modélise par un
circuit résonant. Le courant tunnel varie de façon exponen-
tielle avec la distance pointe-échantillon et nous est donné
par la relation [7] :
IT = SK (D (d) 1/2 Vs exp
7 1 -A (D ( 1/2 - (1)
avec :
- S surface caractéristique du système pointe-surface ;
- K et A sont des constantes ;
- <D le travail de sortie des électrons, fonction non
linéaire qui dépend des propriétés électroniques et
géométriques des matériaux en regard (pointe et
surface).
3.2. Représentation d'état du système
Nous sommes en présence d'un système composé de
deux sous-systèmes multivariables en cascade, l'un d'ordre
3 (céramique piézoélectrique), l'autre d'ordre 2 (oscilla-
tions de la pointe). La loi du courant tunnel est une loi

non-linéaire. Nous n'en tiendrons pas compte pour la
modélisation de notre système. Elle sera intégrée par la
suite dans la matrice de sortie comme un gain non linéaire.
Le système global est donc d'ordre 5. Le vecteur d'état
associé est donc composé de cinq variables :
- U Cd tension aux bornes du condensateur Cd ;
- UCI tension aux bornes du condensateur CI
-/ ; courant traversant la bobine ZJ,
- L- tension aux bornes du condensateur C ;
IL courant traversant la bobine L.
Le vecteur d'entrée U est de dimension 1 et il est
composé de la tension de commande appliquée à la
céramique piézoélectrique. Le vecteur de sortie est aussi à
une dimension. Il s'agit de la distance céramique piézo-
électrique-pointe (D).
La mise sous forme de représentation d'état du système
donne :
o0
N
(2)
22 fJA pour la céramique non chargée, à une amplitude de
0,5 pA pour une résistance de charge de 20 kQ.
- 1 0 0 0
Ù " RI C,, 10 0 0
Un CI o o o
1 RI
,, = 0 _ - 0
ti, LI ëlc0 0 0 0
Lo 1
0 - 0 -NL L
M0 c o
0 U,0UCI
o lu
1 U " l
R
L
R L
T
L -
u,
Le système décrit précédemment est inobservable. En
effet, les modes de vibrations de la céramique piézoélec-
trique ne sont pas accessibles. Afin de rendre notre système
observable il faut effectuer une mesure complémentaire sur
le système amont. Cette mesure doit être réalisée sans avoir
à effectuer de modifications sur l'architecture générale du
microscope à effet tunnel et sans perturber le système
global. Ceci permettra de généraliser cette méthode à tout
type de microscope à effet tunnel, voire plus généralement
à tous les types de microscopes en champ proche. Pour
cela, nous avons réalisé la mesure du courant Ip délivré par
la commande. Cette mesure correspond au courant de
polarisation de la céramique piézoélectrique et rend obser-
vable les modes de vibrations de la céramique ainsi que le
système global. Le vecteur de sortie est finalement de
dimension 21 [Ip D] I.
Le temps de réponse de la céramique piézoélectrique
étant de 20 us, on ne peut espérer mesurer l'évolution du
courant de polarisation en utilisant une fréquence d'échan-
tillonnage de 50 kHz. Pour pallier ce problème, nous avons
volontairement augmenté la constante de temps du système
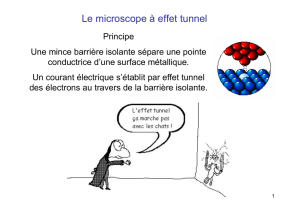
par adjonction d'une résistance Re. L'augmentation des
valeurs de cette résistance (0 à 20 kQ) permet d'obtenir des
temps de réponses plus longs de la céramique piézoélec-
trique de 20 ps à 110 ps (Fig. 3).
L'augmentation du temps de réponse de la céramique
piézoélectrique s'accompagne d'une diminution de
l'amplitude des signaux. Nous passons d'une amplitude de
''' " T---------
- -.
1'\\,.
1 - Il " >'\\ R = 0 - 2 H2.. 1 Il kQ.. 20 kll 1
R k2 -] 0 k2- 20 ki2
!''''
I t
r '-.'
i : ! Y-...... :
t
v i ` i
20 4 () 60 80 100 120 14 () 160 18 ()
Temps ( ! Js)
I- o zo ao bo s oo i ? o iao n°
r,rs cus>
Figure 3. Mise en évidence de la variation du temps
de réponse de la céramique piézoélectrique
en fonction de la résistance de charge.
La mise sous forme de représentation d'état du système
complet, en tenant compte du courant de polarisation de la
céramique piézoélectrique et de la résistance de charge,
donne le système d'équations suivant :
- 1 0 0 0 0
(R'R,) Çl 1 0
0 0 0 (R R) C
ci 0
NR 1 RI NR,
0 1,1 +
(R +) LI TI Ïl 1 U, FR, R') LI
- 1
0 0 0 0 c 0
0 -ci 0 _/R 0 L L u
R +R 0 N0 O + U
l. R +R 0 N 0 0 Ur 1
o -- + R
LJ ci 0 c u
.'
(3)
Cette représentation nous permettra par la suite de simuler
les réponses du système à des excitations.
4. Correction
4.1. Architecture de la boucle de régulation
en altitude
L'implantation de la correction a été réalisée sur une
carte de calcul ayant un processeur de traitement du signal
(DSP). L'application des tensions de commande sur la
céramique piézoélectrique est réalisée par l'intermédiaire
de convertisseurs numérique-analogique (CNA) et d'une
électronique d'adaptation afin d'amplifier les signaux car
les tensions appliquées à la céramique piézoélectrique sont
comprises entre ± 150 V. Le signal de commande est alors
appliqué au microscope à effet tunnel. Les courants tunnel
et piézoélectrique sont mesurées par l'intermédiaire de
convertisseur courant tension à fort gain (101 V/A et
105 V/A) et des convertisseurs analogique-numérique [8]
(Fig. 4).
1

m Dossîer
ÉLECTROTECHNIQUE DU FUTUR
I
V -hi V-HT ! > 1 Nlll\.
d[ : [ P,'I',..... t',..
S'i 1\1SIM
Figure 4. Schéina-bloc de l'ensemble de la boucle de
régulation d'un microscope à effet tunnel.
4.2. Étude de la boucle de régulation
Il faut considérer que la commande d'un microscope à
effet tunnel doit fonctionner plus en régulation qu'en
poursuite. En effet, quand la pointe est en condition tunnel,
la boucle de régulation doit en permanence corriger la
position de la pointe afin de garder la valeur du courant
tunnel à la valeur de consigne désirée. Différents types de
perturbations peuvent faire fluctuer le courant tunnel :
- le balayage de la surface qui engendre des fluctuations
de la distance pointe échantillon ;
- dans le cas d'une surface inhomogène, le courant
tunnel dépend des états électroniques de surface de
l'échantillon en regard avec la pointe (cas des
semiconducteurs) ;
les dérives thermiques de la céramique
piézoélectrique, de la mécanique de maintien, de
l'actionneur et du porte échantillon sont aussi à
prendre en compte.
La commande doit donc réagir très rapidement à toute
perturbation. C'est la raison pour laquelle notre choix s'est
porté sur un mode de réglage à structure variable [8] (Fig. 5).
"' ! [j-t.K.,,.,,h.'..r' "
Âi _ ('<nnmnnJr
CouraW mvertis.sem : \
d2sira· I. V u. u t' : ymurs
l'emubuGnn
kt I t I I Sywnm
ICI - Sll..ln.lpo
I (Jp 1 itn ncnu.
I nunml -
..................................................
! -----
Figure 5. Description de la loi de commande.
4.3. Commande implantée
L'analyse de l'identification réalisée permet en
première approximation de dire que le courant tunnel est
l'image du déplacement de la céramique piézoélectrique et
le courant piézoélectrique est l'image de sa vitesse de
déplacement. La commande à structure variable (CSV)
mise en place repose sur cette constatation. Une droite de
commutation dans l'espace It (courant tunnel) -Ip (courant
1
piézoélectrique) est alors définie. La loi de commutation
s'écrit alors :
S (Ic, It, Ip) = Kc Ic - Kt It - Kp Ip (4)
avec, Ic la consigne désirée et Ke, Kt et Kp les constantes
de paramètrage.
La structure du régulateur est une structure classique,
d'asservissement en position avec un correcteur de type
intégral pour annuler l'erreur statique (Fig. 5). La loi de
commutation S vient en fonction de son signe mettre la
boucle de régulation en contre-réaction positive ou contre-
réaction négative suivant la loi :
(S (IC, It, IP) > 0
I S (Ic, It, Ip) < 0
=/*
t/=-/* (5)
avec U* signal de commande en sortie du correcteur.
L'intérêt de cette structure réside dans le fait qu'elle ne
nécessite pas d'observateur. Elle n'est donc pas tributaire
des paramètres du système. Sa transposition à un autre
microscope à effet tunnel ou plus généralement à un micro-
scope en champ proche est réalisable facilement. De plus,
les calculs de l'observateur, alourdissant notablement
l'algorithme, entraînent une augmentation du temps de
boucle ce qui est préjudiciable pour la commande de
céramiques piézoélectriques.
Le choix d'une CSV avec commutation d'une contre-
réaction variable permet d'obtenir un phénomène transitoire
stable et bien amorti même si les deux contre-réactions
donnent un comportement instable ou à la limite de la
stabilité [9]. De plus, cette structure n'implique pas un
cycle limite en régime permanent contrairement à la CSV
avec commutation au niveau de l'organe de commande : il
s'agit d'une commutation entre deux valeurs constantes,
Umax et U,,,i,,. On obtient alors un état de sortie non
oscillant en régime permanent.
4.4. Résultats et discussion
La difficulté de la mise en place d'une commande à
structure variable pour des actionneurs piézoélectrique est
principalement due à leur temps de réponse. Pour rendre
le système compatible avec la fréquence de boucle dispo-
nible (40 kHz). La résistance de polarisation a été forcée à
une valeur de 10 kO ce qui correspond à un temps de
réponse de 60 us (Fig. 3).
Une application de la CSV sur des céramiques piézo-
électriques a été déjà réalisée dans le cadre de moteurs
piézo-rotatifs [10].
L'étude de la commande à structure variable a été
réalisée en plaçant le système en limite de stabilité en
augmentant le gain du correcteur (Ki = 130). Ce gain
restera par la suite constant dans toutes les mesures
présentées sauf mention contraire.
Comme nous l'avons vu précédemment, la boucle de
régulation doit travailler plus en régulation qu'en poursuite.
Dans le cas d'une étude de la régulation, la réponse du
système à une perturbation doit être réalisée. Le caractère
aléatoire de la perturbation et sa difficulté à être identifiée
rend son étude peu adaptée à la caractérisation d'un
REE
N'2
Février 2002

correcteur. Pour cette raison, nous avons préféré réaliser
l'étude de la boucle dans le cas d'une poursuite de la valeur
de consigne. Les réponses du système ont été calculées et
mesurées pour des changements de la valeur de consigne
du courant tunnel sous forme d'échelon de 10 nA à 20 nA.
Afin de mettre en évidence l'influence de la CSV sur la
boucle d'asservissement, nous avons déterminé la réponse
du système avec correction intégrale sans intervention de
la loi de commutation de la CSV. Cette réponse servira de
référence afin d'évaluer les avantages de la CSV (Fig. 6).
24- -- ---- ----- ------ -----
'--J\ . r...
26-
24
c'
c :
: : 18'
c
Cotiraiit tuiiiiel
g 16-, i
v 4_
14- Çotisigne
12-
10- mmi
0 :
-20-
p= I
mr
- 40- :_40_ I
-60-
-80-
c
çc -lpp-
C n
f
-120--
-140-
-160-
18 '),
- 180°,5 0 1 3 4 Ternps (ms) I
Figure 6. Réponse en courant tunnel et commande associée
de la boucle de régulation pour un changement de consigne
de 10 nA à 20 nA sous forme d'échelon avec correcteur
à action intégrale (Ki = 130).
La réponse met en évidence des oscillations amorties
dues au fort gain du correcteur proportionnel. Un dépas-
sement de la valeur de consigne est aussi présente ce qui
est néfaste pour un microscope à effet tunnel.
En effet, le fait de dépasser la valeur de consigne du courant
tunnel engendre une diminution de la distance qui peut
provoquer le contact et l'endommagement de la pointe [3].
Le temps de stabilisation de la boucle est de 2,2 ms. En
effet, l'évènement rencontré entre 2,8 ms et 3,2 ms
correspond à une perturbation, événement identifiable par
son apparition sur le courant tunnel avant la réaction de la
boucle d'asservissement.
Nous présentons par la suite deux résultats mettant en
évidence la commande à structure variable avec une CSV
lente (Fig. 7) et une CSV rapide (Fig. 8).
26
24
22--
18 -
to : h. ! WMt- --h- -- ---- - ---
" 18'-----c
2
- 60 - :
-40 - ---- 4------- -------- -------- --------
, : () 0
20--
-140
160
181,
40 -
GO_
- 100-
- I 20 -I
c- IGO-
1 80 -
o0p - -
- 0.5 O I _ 3 4
'0 -,'
- (),5 0 2 3- 0,5 0 1 2. : \ 4
Figure 7. Réponse réelle en courant tunnel. loi de commutation
et commande associée de la boucle de régulation pour un
changement de consigne de JO nA à 20 nA sousforme
d'échelon pour une CSV rapide (Kc = f, KtlKp = 115).
26,
24
221
-iÏN
.E5
c= _.- --- - F) f'---Courant tunnt
t'mm
-Consign
i5 16-
S. 14 Cou-ait tlinnel
12-
10-L
0-1
-20-
40-
-60
-80- A
-100-
Er=- -120-
E-140-
-160-
-180
- -)
-.80- --- ------- ----- A.---- ------
-220-
-05 0 2 3 4 Teiips (ins)
Figure 8. Réponse réelle en courant tunnel, loi de commutation
et commande associée de la boucle de régulation pour un
changement de consigne de 10 à 20 nA sous forme
d'échelon pour une CSV lente (Kc = Kt, KtlKp = 1/10).
REE
NI 2
, 20) 2 1
 6
7
6
7
1
/
7
100%