Principes de vol d`un aéronef, ainsi que la construction d`un modèle

!
"#$%&$'()!*(!+,-!*./%!01#,%(2!0$%)$!3/(!-0!
&,%)4#/&4$,%!*./%!5,*6-(!#1*/$4!78!
!
Gymnase!Auguste!Piccard!
Lausanne!
Travail!de!Maturité!
Par$Julien$Borel$3M8$
Maitre$responsable$:$Laurent$de$Schoulepnikoff$
Date$de$reddition$:$le$10$novembre$2014$

!
9!
!
7:;<=:!
!
>0%)!&(!*,))$(#?!%,/)!0--,%)!4#0$4(#!-(!)/@(4!*(!-.01#,*A%05$3/(B!C.01#,*A%05$3/(!()4!-0!
)&$(%&(!*/!5,/+(5(%4!*(!-.0$#B!8(--(D&$!()4!/%(!E#0%*(!F#0%&G(!50$)!%,/)!0--,%)!
/%$3/(5(%4!14/*$(#!&(!3/$!4,/&G(!0/H!0+$,%)B!!!
!
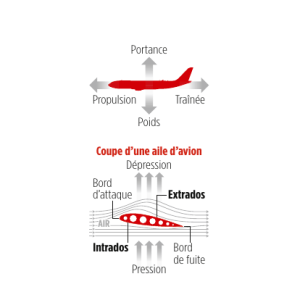
I,/)!0--,%)!4,/4!*.0F,#*!%,/)!$%41#())(#!0/!'#$%&$'(!*(!+,-B!8.()4DJD*$#(!-()!2,#&()!3/$!
'(#5(44(%4!J!/%!0+$,%!*(!+,-(#B!8(!'#$%&$'(!()4!&,5'#$)!*('/$)!KLMN?!*('/$)!3/(!-()!
2#6#()!O#$EG4!,%!20$4!',/#!-0!'#(5$6#(!2,$)!*1&,--(#!/%!0+$,%B!=0$%4(%0%4!&(!'#$%&$'(!
'(/4DP4#(!&,5'#$)!'0#!4,/)?!(4!&.()4!&(!3/(!%,/)!0--,%)!+,$#B!I,/)!0--,%)!14/*$(#!-()!2,#&()!
3/$!0E$))(%4!)/#!/%!0+$,%?!&(--()!3/$!-/$!'(#5(44(%4!*(!*1&,--(#B!
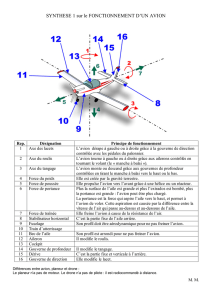
I,/)!0--,%)!0/))$!&,5'#(%*#(!&,55(%4!2,%&4$,%%(%4!-()!*$221#(%4()!'0#4$()!*./%!0+$,%B!
I,4055(%4!-0!2,%&4$,%!*(!-.0$-(?!*()!0$-(#,%)?!*(!-.G1-$&(?!*(!-0!'#,2,%*(/#!(4!*(!-0!*1#$+(B!
8()!*$221#(%4()!'0#4$()!'(#5(44(%4!J!-.0+$,%!*(!)(!*1'-0&(#!0$)15(%4!*0%)!-()!4#,$)!
*$5(%)$,%)B!
!
"/$)?!%,/)!0--,%)!%,/)!&,%)0&#(#!J!-0!&,%)4#/&4$,%!*./%!5,*6-(!#1*/$4!41-1&,550%*1B!Q!
'0#4$#!*(!'-0%)?!%,/)!0--,%)!&,%)4#/$#(!/%!'#,4,4A'(!3/$!*(+#0$4!+,-(#B!C0!50#&G(!J!
)/$+#(!()4!(H'-$3/1(!*0%)!-()!E#0%*()!-$E%()B!I,/)!0--,%)!(%)/$4(!4()4(#!&()!'#,4,4A'()!
',/#!)0+,$#!)$!-()!'-0%)!140$(%4!&,##(&4)B!
!
R%)/$4(?!%,/)!0--,%)!%,/)!$%41#())(#!J!-.0)'(&4!'GA)$3/(!*./%!0+$,%B!R%!4#0+0$--0%4!)/#!/%!
5,*6-(!#1*/$4?!%,/)!0--,%)!&0-&/-(#!-()!2,#&()!3/$!0E$))(%4!*())/)B!S%!+0!',/+,$#!(%!4$#(#!
-()!&,(22$&$(%4)!*(!',#40%&(!(4!*(!4#0$%1(!E#T&(!J!-0!2,#5/-(!*(!-.01#,*A%05$3/(B!U#T&(!J!
&()!&,(22$&$(%4)?!$-!%,/)!)(#0!',))$F-(!*(!&0-&/-(#!4G1,#$3/(5(%4!-0!+$4())(!*(!-.0+$,%!(%!
2,%&4$,%!*/!4(5')B!
!
V$%0-(5(%4?!%,/)!2(#,%)!+,-(#!/%!0+$,%!41-1&,550%*1!(4!&0-&/-(#,%)!)0!+$4())(!J!
*$221#(%4()!'G0)()!*(!+,-B!!
R)4D&(!3/.0+(&!/%(!)(/-(!2,#5/-(!$-!()4!',))$F-(!*(!&0-&/-(#!-0!+$4())(!*(!-.0+$,%!J!
%.$5',#4(!3/(-!5,5(%4!*/!+,-!W!
I,/)!#1',%*#,%)!J!&(44(!3/()4$,%!(%!0%0-A)0%4!-()!#1)/-404)!,F4(%/)!(%!'#04$3/(!0+(&!-()!
#1)/-404)!,F4(%/)!'0#!-0!2,#5/-(!4G1,#$3/(B!!
!

!
X!
Table!des!matières!
!
1.!Le!but ..............................................................................................................................................4!
2.!Introduction .................................................................................................................................5!
2.1.!Introduction!générale!sur!l’aviation...........................................................................................5!
2.2.!Le!tube!de!Bernoulli .........................................................................................................................6!
2.3.!Principe!de!vol....................................................................................................................................7!
2.4.!Les!forces!aérodynamiques ...........................................................................................................8!
3.!Construction!de!l’avion.......................................................................................................... 12!
3.1.!Le!fuselage ........................................................................................................................................ 13!
3.2.!L’aile.................................................................................................................................................... 14!
3.3.!Le!moteur .......................................................................................................................................... 15!
3.4.!La!dérive............................................................................................................................................ 16!
3.5.!La!profondeur.................................................................................................................................. 16!
3.6.!L’électronique.................................................................................................................................. 17!
3.7.!Préparatifs!avant!le!vol ................................................................................................................ 17!
3.8.!Les!prototypes .................................................................................................................................18!
4.!Calcul!des!différentes!forces!qui!agissent!sur!l’avion.................................................. 21!
4.1.!Représentations!de!ces!forces.................................................................................................... 21!
4.2.!Expériences!en!laboratoire......................................................................................................... 22!
4.3.!Résultats............................................................................................................................................ 25!
4.4.!Programme!XFLR5 ......................................................................................................................... 29!
4.5.!Comparaison!des!mesures!en!laboratoire!avec!les!résultats!de!XFLR5....................... 31!
4.6.!Calcule!de!CD!théoriquement ...................................................................................................... 32!
4.7.!Conclusion......................................................................................................................................... 33!
5.!Le!décollage ............................................................................................................................... 34!
5.1.!Calculs!théoriques.......................................................................................................................... 34!
5.2.!Calculs!expérimentaux ................................................................................................................. 38!
5.3.!Analyse!des!résultats..................................................................................................................... 40!
5.4.!Sources!d’erreurs ........................................................................................................................... 41!
6.!Vol!à!vitesse!constante........................................................................................................... 42!
6.1.!Calculs!théoriques.......................................................................................................................... 42!
6.2.!Calculs!expérimentaux ................................................................................................................. 44!
6.3.!Analyse!des!résultats..................................................................................................................... 49!
6.4.!Sources!d’erreurs ........................................................................................................................... 50!
7.!Conclusion.................................................................................................................................. 51!
8.!Annexes....................................................................................................................................... 52!
8.1.!Définitions ........................................................................................................................................ 52!
8.2.!Sources............................................................................................................................................... 54!
!
!

!
N!
1.#Le#but#
!
C(!F/4!*(!&(!#0'',#4!&,%)$)4(!J!!*15,%4#(#!(H'1#$5(%40-(5(%4!!-(!'#$%&$'(!*(!F0)(!*/!
+,-!*Y/%!0+$,%!Z!-,$!*(!I([4,%?!3/$!$%&-/4!-0!2,#5/-(!',/#!-0!2,#&(!*(!',#40%&(!\0+(&!-(!
&,(22$&$(%4!*(!',#40%&(]?!(4!-0!2,#5/-(!',/#!-0!2,#&(!*(!4#0^%1(!\0+(&!-(!&,(22$&$(%4!*(!
4#0^%1(]B!
!
_,/4!*.0F,#*?!%,/)!%,/)!$%41#())(#,%)!J!-0!&,5'#1G(%)$,%!*/!'#$%&$'(!*(!+,-B!8,55(%4!
/%!0+$,%!+,-(D4D$-!W!`/(--()!),%4!-()!-,$)!3/$!#1E$))(%4!-(!+,-!*./%!0+$,%!W!I,/)!
&,5'#(%*#,%)!(%)/$4(!&,55(%4!/%!0+$,%!20$4!',/#!)(!*1'-0&(#!*0%)!-()!4#,$)!
*$5(%)$,%)!J!-.0$*(!*()!0$-(#,%)?!*(!-0!'#,2,%*(/#!(4!*(!-0!*1#$+(B!
!
"/$)?!%,/)!0--,%)!&,%)4#/$#(!%,4#(!'#,'#(!0+$,%!41-1&,550%*1B!a,/)!0--(b!+,/)!
*(50%*(#!&,55(%4!()4D$-!',))$F-(!*(!&,%)4#/$#(!/%!0+$,%!),$D5P5(!W!8.()4!&(!3/(!%,/)!
+(##,%)!0+(&!/%(!50#&G(!J!)/$+#(!',/#!,F4(%$#!/%!'#,4,4A'(B!
!
R%)/$4(?!%,/)!&0-&/-(#,%)!-()!&,(22$&$(%4)!*(!',#40%&(!(4!*(!4#0$%1(B!c-!).0E$#0!*0%)!/%!
'#(5$(#!4(5')?!J!-.0$*(!*./%!5,*6-(!#1*/$4?!*(!&0-&/-(#!&()!&,(22$&$(%4)!J!-.0$*(!*(!-0!
2,#5/-(!0''#,'#$1(!(4!*()!#1)/-404)!,F4(%/)!(%!-0F,#04,$#(!',/#!-0!2,#&(!*(!',#40%&(!(4!
*(!4#0^%1(B!"/$)!*(!&,5'0#(#!&()!#1)/-404)!0+(&!/%!-,E$&$(-!3/$!)$5/-(!/%!0+$,%!(%!
),/22-(#$(B!c-!(H$)4(!'-/)$(/#)!514G,*()!',/#!&0-&/-(#!&()!&,(22$&$(%4)!*,%4!%,/)!+(##,%)!
(%!*140$-!-()!50#&G()!J!)/$+#(B!
!
>0%)!/%!*(/H$65(!4(5')?!(%!&,%%0$))0%4!&()!2,#&()!01#,*A%05$3/()?!%,/)!&0-&/-(#,%)!
4G1,#$3/(5(%4!-0!+$4())(!*(!-.0+$,%!J!*$221#(%4()!'G0)()!*(!+,-?!02$%!*(!&,5'0#(#!&()!
#1)/-404)!4G1,#$3/()!0+(&!&(/H!,F4(%/)!(%!'#04$3/(!J!-.0$*(!*./%!0+$,%!41-1&,550%*1B!
!
;(#0D4D$-!',))$F-(!0+(&!/%(!)(/-(!2,#5/-(!*(!&0-&/-(#!-0!+$4())(!*(!-.0+$,%!J!%.$5',#4(!
3/(--(!'G0)(!*/!+,-!W!!
!
I,/)!4(%4(#,%)!@/)4(5(%4!*(!#1',%*#(!J!&(44(!3/()4$,%!*0%)!&(!#0'',#4B!!
!

!
d!
2.#Introduction##
2.1.#Introduction#générale#sur#l’aviation#
!
>0%)!&(!*,))$(#?!%,/)!0--,%)!14/*$(#!-(!'#$%&$'(!*/!+,-!*/!',$%4D*(D+/(!*(!-0!'GA)$3/(B!
>(!%,)!@,/#)?!-.0+$04$,%!%.()4!'-/)!/%(!*$)&$'-$%(!(H4#0,#*$%0$#(B!`/$!0/@,/#*.G/$!%.0!
(%&,#(!@050$)!'#$)!-.0+$,%!W!"#()3/(!'(#),%%(?!&0#!-.0+$04$,%!()4!*(+(%/(!F0%0-(!(4!)e#(B!
8('(%*0%4?!,%!,/F-$(!3/(!&(44(!*$)&$'-$%(!0!20$4!)()!*1F/4)!$-!A!0!J!'($%(!&(%4!0%)B!fKgB!
8.140$4!(%!KLMX!3/(!-()!V#6#()!O#$EG4!,%4!',/#!-0!'#(5$6#(!2,$)!20$4!+,-(#!/%!01#,%(2!
',/#!/%(!*/#1(!*(!NM!)(&,%*()!J!'($%(B!R%)/$4(?!/%(!2,$)!-(!'#$%&$'(!&,5'#$)?!-.0+$04$,%!
).()4!+$4(!*1+(-,''1(B!!
!
C(!*1+(-,''(5(%4!*()!01#,%(2)!f9g!).()4!#0'$*(5(%4!20$4!*0%)!-(!*,50$%(!5$-$40$#(!-,#)!
*(!-0!"#(5$6#(!U/(##(!5,%*$0-(B!"/$)?!J!-0!2$%!*(!-0!E/(##(?!-.0+$04$,%!0!*e!4#,/+(#!/%(!
%,/+(--(!/4$-$41B!I,4055(%4!-0!',)4(!0!*1&$*1!*./4$-$)(#!-()!0+$,%)!',/#!4#0%)',#4(#!-(!
&,/##$(#B!C.0+$04$,%!).()4!051-$,#1(!(%&,#(!0/!%$+(0/!*(!-.0/4,%,5$(!Z!(%!KL9h!8G0#-()!
C$%*F(#EG!0!#1/))$!-0!4#0+(#)1(!*(!-.04-0%4$3/(!*(!I([!i,#j!J!"0#$)!)0%)!()&0-(!(%!XX!
G(/#()B!Q!&(44(!1',3/(?!,%!'(%)(!*1@J!J!-.0+$04$,%!&$+$-(?!50$)!-()!0+$,%)!%(!
4#0%)',#40$(%4!3/./%!'(4$4!%,5F#(!*(!'0))0E(#)B!!
c-!0!20--/!044(%*#(!-.0%%1(!KLNM!',/#!3/(!-(!'#(5$(#!0+$,%!J!5,4(/#!J!#10&4$,%!\#10&4(/#]!
0''0#0$))(B!c-!0!*.0F,#*!)(#+$!J!*()!2$%)!5$-$40$#()?!'/$)!J!-0!2$%!*(!-0!>(/H$65(!U/(##(!
5,%*$0-(!$-!0!141!/4$-$)1!',/#!4#0%)',#4(#!*()!'0))0E(#)B!R%!KLdk!-(!l,($%E!hMh?!*Y/%(!
&0'0&$41!*(!KLM!'-0&()?!20$4!)()!'#(5$(#)!+,-)!0+(&!*()!'0))0E(#)B!8.()4!-(!'#(5$(#!0+$,%!
*(!&(44(!1',3/(!J!#())(5F-(#!-(!'-/)!J!&(/H!0&4/(-)B!
!
>(!%,)!@,/#)?!-.0+$04$,%!%(!&())(!*(!).051-$,#(#B!=0$)!-(!'#$%&$'(!*(!F0)(!*/!+,-!#()4(!-(!
5P5(!3/(!',/#!-.0+$,%!*()!V#6#()!O#$EG4B!;(/-)!-0!)1&/#$41?!-(!&,%2,#4!(4!-(!#(%*(5(%4!
),%4!-()!3/()4$,%)!3/(!-()!$%E1%$(/#)!)(!',)(%4!',/#!-()!2/4/#)!0+$,%)B!
!
>0%)!-0!)/$4(!*(!&(!4(H4(?!%,/)!0--,%)!&,5'#(%*#(!&,55(%4!2,%&4$,%%(!/%!0+$,%B!I,/)!
0--,%)!*,%&!)0+,$#!&,55(%4!-()!V#6#()!O#$EG4!(4!-()!0/4#()!'$,%%$(#)!,%4!#1/))$!J!
&,%&(+,$#!-(/#)!0+$,%)B!Q$%)$?!$-!%,/)!)(#0!'-/)!20&$-(!*(!&,5'#(%*#(!-()!'#,F-65()!
0/H3/(-)!)(!),%4!&,%2#,%41)!-()!$%E1%$(/#)!',/#!3/(!KMM!0%)!0'#6)!-(!'#(5$(#!+,-?!%,/)!
'/$))$,%)!'#(%*#(!-.0+$,%!!*(!20m,%!)e#(B!!Q2$%!*(!)$5'-$2$(#!-(!4#0+0$-?!%,/)!0--,%)!%,/)!
'(%&G(#!)/#!/%!5,*6-(!#1*/$4!*.0+$,%!#0*$,!41-1&,550%*1B!
!
<%!0+$,%!41-1&,550%*1!()4!/%!5,*6-(!#1*/$4!3/$!)(!'$-,4(!E#T&(!J!/%(!41-1&,550%*(B!
;,%!'#$%&$'(!()4!3/(!-0!41-1&,550%*(!(%+,$(!/%!)$E%0-!#0*$,!J!/%!#1&('4(/#!(4!3/(!&(!
#1&('4(/#?!)/$+0%4!-(!)$E%0-?!&,%4#n-(!*()!)(#+,5,4(/#)!3/$!0&4$,%%(%4!*()!E,/+(#%()!
'(#5(440%4!0$%)$!-(!&,%4#n-(!*(!-.0+$,%B!c-!(H$)4(!'-/)$(/#)!4A'()!*(!5,4(/#B!=,4(/#!J!
#10&4$,%?!5,4(/#!J!(H'-,)$,%!,/!5,4(/#!1-(&4#$3/(B!>0%)!%,4#(!&0)?!%,/)!0--,%)!
/%$3/(5(%4!%,/)!$%41#())(#!0/!5,4(/#!1-(&4#$3/(B!
!
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
1
/
54
100%