Dossier pédagogique

Printemps des Sciences 2016 – Bruxelles
Contrôle autonome d’une serre
ULB – Faculté des Sciences – Département d’Informatique
Anthony Caccia, André Madeira Cortes, Nikita Marchant et Romain Fontaine
Le but de ce projet est de réguler en temps réel l’environnement d’une serre grâce à des capteurs reliés à un ordinateur sur
lequel tourne un programme informatique. Nous contrôlons en temps-réel la température et la luminosité de la serre ainsi
que l'humidité du sol.
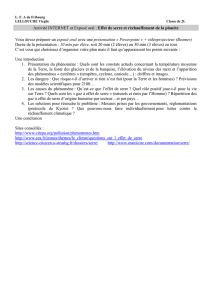
Dispositif expérimental
Des capteurs, contrôlés par un Arduino (un Arduino est un micro-contrôleur qui permet de relier des moteurs et des capteurs
à un ordinateur), sont installés dans la serre et mesurent les différentes variables. Un programme informatique exécute
alors des algorithmes pour décider des actions à effectuer afin d'amener la serre dans un état optimal pour les plantes qui
y poussent. Un algorithme fonctionne comme une recette de cuisine : il s’agit d’une suite d’actions réalisées dans un ordre
fixé pour partir de données initiales (les “ingrédients”), ici les mesures des capteurs et arriver à un résultat (le “gâteau”), ici
les actions à effectuer.
Un de ces algorithmes est l’algorithme “Bang Bang”, qui fonctionne selon le même principe qu’un thermostat (si il fait trop
froid, il décide d’allumer le chauffage, si il fait trop chaud, il l’éteint). “Bang Bang” a uniquement deux états : allumé ou
éteint
L’autre algorithme que nous utilisons est PID. Celui-ci permet des actions plus nuancées : les actions sont proportionnelles
à la différence entre la valeur mesurée et la valeur désirée.
On peut faire une analogie entre PID et la manière dont on règle la température de l'eau de sa douche : au départ on met le
chaud au maximum, quand la température se met à augmenter, on commence à diminuer le débit d'eau chaude jusqu'à ce
que l'eau soit à la température désirée. De plus, si jamais l'eau devient trop chaude ou trop froide pendant la douche, on fait
aussi de petites corrections pour qu'elle reste toujours agréable.
PID utilise trois “actions”:
x l’action Proportionnelle, qui permet la correction proportionnelle à l'erreur courante;
x l’action Intégrale, qui agit selon les anciennes corrections;
x et l’action Dérivée, qui permet de rendre la fonction plus stable.
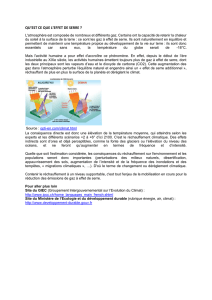
Ces trois actions nécessitent des paramètres, Kp, Ki et Kd qui pondèrent chacune des actions comme on peut le voir sur
l’équation ci-dessous :
e(t) représente l’erreur calculée à l’instant t et u(t) la correction effectuée à l’instant t

Printemps des Sciences 2016 – Bruxelles
Le choix de ces paramètres Kp, Ki et Kd est important mais compliqué. En effet, de mauvaises valeurs de ces paramètres
pourraient rendre le système instable. Il existe plusieurs méthodes pour les sélectionner.
La méthode que nous avons adoptée est appelé un “algorithme génétique” car l’on peut faire des analogies entre cet
algorithme et le principe biologique de la mitose et de la méiose. La première étape de l’algorithme génétique est de créer
une population d'individus virtuels dont l'unique chromosome possède une valeur aléatoire pour chaque paramètre (Kp, Ki
et Kd). Chacun de ceux-ci est testé sur l’environnement et reçoit un score selon ses performances. Ensuite, un peu comme
la sélection naturelle, les meilleurs reçoivent plus de chances de survie et de procréation. Comme pour la méiose, ces
procréations peuvent générer des mutations ou “crossing-over” (enjambements génétiques) de chromosomes. Au bout
d’un certain nombre de générations, le meilleur est sélectionné.
Présentation pédagogique
Nous présenterons notre projet avec une serre lors du Printemps des Sciences. Dans celle-ci, nous montrerons aux enfants
l’électronique utilisée pour les mesures. Nous les laisserons aussi perturber la luminosité de la serre et montrerons que
l'ordinateur arrive à contrebalancer ces perturbations pour retourner à un état optimal pour les plantes.
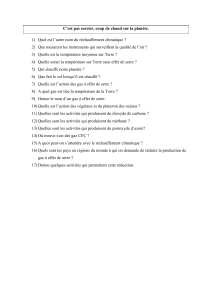
Pour rendre la présentation encore plus dynamique et pédagogique, nous proposerons aussi aux enfants d’interagir avec
une version miniature de la serre qui sera équipée d'un capteur de température, de ventilateurs et d'un chauffage.
Les enfants pourront essayer d'amener la serre miniature à une température fixée (autour de 30°) en dosant la puissance
des ventilateurs et du chauffage. Lorsqu’ils comprendront qu’il s’agit d’une tâche compliquée et répétitive, nous activerons
notre programme qui régulera automatiquement la température pour montrer l'efficacité et la praticité de notre solution.

!
"#$%&$'(')'
*'+%*'

!"#$%#&'&(&
)&*+&,-.
+&,
$.
!"#
#$
%
&'
1
/
4
100%