Physique Statistique (M1) ph402 – Notes de cours —I—

Physique Statistique (M1)
ph402 – Notes de cours
—I—
Jean-Baptiste Fournier
Universit´e Paris 7 – Denis Diderot
2004-2005

2

Chapitre 1
Statistique microcanonique
1.1 Rappels de probabilit´es
1.1.1 Probabilit´es discr`etes
Soient des ´ev`enements al´eatoires A,B,. . ., r´esultats d’´ev`enements ´el´emen-
taires sous-jacents ´equiprobables. Appelons Γ l’ensemble de ces ´ev`enements
et Ω son cardinal. Soit Xun ´ev`enement quelconque. Soit Ω(X) le cardinal
de l’ensemble des ´ev`enements ´el´ementaires correspondant `a X. Par d´efinition
P(X) = Ω(X)/Ω est la probabilit´e de l’´ev`enement X.
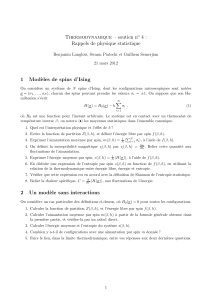
Ex. : lancer un d´e.
1 2
4
5 6
3
Γ
A
C
B
A: jet pair — P(A) = Ω(A)
Ω=3
6=1
2.
B: mult. de 3 — P(B) = Ω(B)
Ω=1
3.
C: jet ≤3 — P(C) = Ω(C)
Ω=1
2.
Propri´et´es
•0< P (X)<1 (1 : ´ev`enement certain)
•Probabilit´e de Aet B(pair & mult. de 3)
P(AB) = Ω(A∩B)
Ω=1
6.(1.1)
1

2Universit´e Paris VII – Jean-Baptiste Fournier
•Probabilit´e de Aou B
P(A+B) = Ω(A∪B)
Ω=Ω(A) + Ω(B)−Ω(A∩B)
Ω.(1.2)
ainsi
P(A+B) = P(A) + P(B)−P(AB).(1.3)
Si les ´ev`enements sont exclusifs : P(AB) = 0, ainsi
P(A+B) = P(A) + P(B) (´ev`enements exclusifs).(1.4)
ici P(A+B) = 4
6=2
3.
•Probabilit´e de Asachant B
P(A|B) = Ω(A∩B)
Ω(B)=P(AB)
P(B).(1.5)
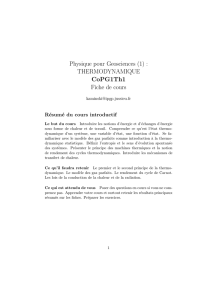
Ind´ependance statistique
Aet Bsont stat. ind´ep. ⇐⇒ savoir Bn’a pas d’incidence sur l’issue de A
(et vice versa), i.e. P(A|B) = P(A) ; ainsi
P(AB) = P(A)P(B) (stat. ind´ep.).(1.6)
Γ1 Γ2
Γ
P
I
1
2
3
P1
I2
I3
P2
P3
I1
A
B
A et B

Physique statistique (M1) – I. Statistique microcanonique 3
On comprend mieux cette ind´ependance grˆace `a la notion d’espace–produit
(voir sch´ema ci-contre). Lancer un d´e c’est comme faire deux tirages ind´epen-
dants : (i) la parit´e (P ou I), (ii) le rang pour une parit´e donn´ee (1, 2 ou 3).
Ainsi I1 correspond `a 1, P1 `a 2, I2 `a 3, P2 `a 4, etc. L’espace Γ est l’“espace–
produit” des deux espaces Γ1et Γ2; la propri´et´e An’´etant d´etermin´ee que par
le premier tirage et la propri´et´e Bque par le second, il vient naturellement :
P(AB) = Ω1(A)Ω2(B)
Ω1Ω2
=P(A)P(B).(1.7)
1.1.2 D´enombrements
Permutations
Il y a N! fa¸cons de permuter Nobjets.
1234567
1o o o o o2
Il y a Nfa¸cons de placer le 1er, multipli´ees par N−1 fa¸cons de placer le 2e,
etc. (Imaginer une arborescence de toutes les possibilit´es.)
•Formule de Stirling
N!'NNe−N√2πN. (1.8)
Pour Nde l’ordre du nombre d’Avogadro ('6.02 ×1023) :
ln N!≈Nln N−N(N≈1023).(1.9)
Ici on a neglig´e des termes O(log N)≈23 tandis que les termes retenus sont
de l’ordre de 1023.
•Fonction Gamma d’Euler
Γ(x) = Z∞
0dt tx−1e−t.(1.10)
Il est facile de voir que Γ(1) = 1 (notons aussi que Γ(1
2) = √π) et que d’autre
part
Γ(x+ 1) = −Z∞
0dt txd
dte−t=xΓ(x) (1.11)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
1
/
40
100%