interception d`une balle

INTERCEPTION DE BALLE :
TEST D’UNE LOI DE CONTRÔLE EN ENVIRONNEMENT VIRTUEL
Chardenon, A., Montagne, G., Buekers, M.J., Bootsma R.J., & Laurent, M.
UMR Mouvement et Perception Université de la Méditerranée et CNRS
Introduction :
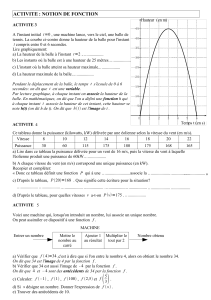
Chacun d’entre nous est capable de se déplacer pour attraper un ballon avant qu’il ne tombe au sol. Pour cela, nous avons besoin d’une
information qui résume les déplacements combinés de l’individu et de la balle. A l’heure actuelle, la seule formalisation des relations entre
information et mouvement dans le cadre des tâches de capture de balle a été réalisée par Peper et ses collaborateurs (1994). Cette
formalisation a permis d’énoncer une loi de contrôle qui rend compte de ce que doit faire le sujet pour réussir dans une tâche d’interception
de balle. Selon cette loi, il suffirait à l’acteur de moduler l’accélération de sa main sur la base d’un différentiel de vitesse spécifié
optiquement. La modulation de l’accélération permettrait au sujet de positionner sa main au bon endroit au bon moment sans qu’il ait besoin
de connaître les propriétés spatio-temporelles du point de rencontre avec le mobile (Bootsma et al.,1997) : Accélération = Vitesse
Requise – Vitesse Courante (Equation1)
Dans cette relation, la vitesse courante correspond à la vitesse de la main à l’instant t considéré. La vitesse requise correspond à la vitesse
théorique vers laquelle il faut tendre pour réussir la tâche. Cette vitesse requise peut être exprimée par un rapport entre la distance latérale qui
sépare la main de la projection de la balle sur l’axe de déplacement de la main, et le temps de pré-contact entre la balle et l’axe. Dans le cadre
de l’expérimentation qui va suivre nous proposons d’utiliser une tâche d’interception de mobile induisant un déplacement locomoteur dans
un environnement virtuel et de faire varier les conditions expérimentales. Nous évaluerons dans un premier temps, pour différentes
conditions d’approche de la balle, la capacité des sujets à répondre aux exigences de la tâche c’est-à-dire à arriver au bon endroit au bon
moment. Nous chercherons dans un deuxième temps d’éventuelles régulations au cours du déplacement. Enfin, en testant la loi de contrôle
citée (Equ.1) nous tenterons de mettre en évidence dans quelle mesure cette loi est applicable en l’état à des tâches différentes de celle pour
laquelle elle a été formalisée.
Méthode :
8 sujets, masculins, âgés de 19 à 26 ans ont participé volontairement à cette expérience. Tous avaient une vision normale ou corrigée.
Cette expérience a été réalisée sur un dispositif expérimental couplant un tapis roulant et un environnement virtuel (DeRugy et al. 2000).
Grâce à ce dispositif la scène visuelle obtenue via une station graphique de type “ Silicon Graphics Indy ” est le résultat de l’action du sujet
sur le tapis roulant. Le sujet se déplace selon une trajectoire rectiligne correspondant à l’axe du tapis. Les positions occupées par le sujet et
par les différents objets de l’environnement sont enregistrées selon une fréquence d’échantillonnage de 100 Hz. Il s’agissait pour le sujet
d’intercepter de la tête un mobile se déplaçant à vitesse constante sur un plan horizontal passant par la tête, au moment même où ce mobile
traversait l’axe du tapis roulant, en procédant si nécessaire à des ajustements de sa vitesse de déplacement. Trois variables ont été
manipulées : (a) un facteur “ angle d’approche ” de la balle, qui permettait de faire apparaître la balle à gauche ou à droite de l’axe; (b) un
facteur “ vitesse d’approche ”, qui laissait plus ou moins de temps au sujet pour ajuster son déplacement et (c) un facteur “ décalage ” à trois
modalités D1 = +1 m; D2 = 0 m et D3 = -1 m. Ce dernier facteur avait pour fonction d’imposer au sujet des régulations de natures
différentes. Dans les conditions +1 m et –1 m les sujets devaient accélérer et décélérer pour réussir la tâche alors que dans la condition 0 m,
le maintien d’une vitesse constante suffisait à assurer une interception correcte. Pour chaque condition expérimentale, on présentait 5 essais
aux sujets. Ainsi 60 essais étaient répartis aléatoirement dans 4 blocs de 15 essais avec une période de repos de 5 minutes entre les blocs.
Résultats :
Le pourcentage de réussite des sujets est de 56.2%. Les résultats de l’analyse de variance révèlent un effet principal du décalage
(F(2,14) = 7.343, p<.05) : la performance est meilleure lorsque le décalage est de –1 m (i.e., quand le sujet doit ralentir) que dans les autres
conditions. Dans un deuxième temps, nous avons choisi d’évaluer la mise en œuvre de régulations à partir de l’analyse de l’évolution de la
variabilité de l’erreur courante au pointage. Cette erreur courante reflète à chaque instant l’écart (si le sujet continue à la même vitesse) entre
la position calculée du sujet et la position de la balle sur l’axe de déplacement au moment où celle-ci croisera l’axe. Au regard de l’analyse
précédente, nous avons différencié uniquement les trois conditions de décalage. La variabilité moyenne de l’erreur courante a été calculée sur
6 portions successives au cours du déplacement : de 6 à 5 secondes avant l’interception, puis sur les portions 5-4 s, 4-3 s, 3-2 s, 2-1 s et sur la
dernière seconde. L’anova 3 (décalage) x 6 (portions) révèle un effet principal de la portion (F(5,35) = 98.765, p<.001). La variabilité de
l’erreur courante diminue systématiquement dans les 6 dernières secondes de l’approche. Enfin, pour tester directement la stratégie proposée
par Peper et al. (1994), nous avons effectué des régressions linéaires multiples appliquées uniquement aux essais réussis. Nous avons ainsi
recueilli des valeurs de R2, et ce pour 6 phases au cours du déplacement : à partir de 6 secondes avant l’interception, 5 s, 4 s, 3 s, 2 s, et sur la
dernière seconde précédant l’interception. Une anova 6 (phases) sur les valeurs de R2 révèle un effet principal de la phase (F(5,35) = 71.518,
p<.001). Les valeurs de R2 sont significativement plus élevées pour les deux dernières secondes d’approche.
Discussion :
Plusieurs travaux ont mis en évidence l’utilisation d’une loi de contrôle selon laquelle, pour intercepter une balle, il suffirait de moduler
l’accélération de sa main sur la base d’un différentiel de vitesse spécifié optiquement (Bootsma et al., 1997). Notre étude avait pour objectif
de tester la possible extension de cette loi de contrôle à des actions d’interception nécessitant la production d’un déplacement locomoteur.
L’analyse de la performance des sujets a mis en évidence que seule la manipulation du lieu d’arrivée de la balle pouvait affecter la
performance. Les sujets sont capables d’adapter leur comportement à la situation particulière qu’ils rencontrent, et ils y parviennent d’autant
plus facilement qu’ils doivent ralentir pour intercepter la balle. L’analyse de la variabilité de l’erreur courante en cours d’approche révèle que
les sujets réduisent progressivement cette variabilité dans les 6 secondes qui précèdent l’interception. Les régulations sont donc réalisées de
manière continue en cours d’approche. L’analyse réalisée sur la stratégie révèle des résultats contrastés. On peut décomposer l’action
d’interception en deux phases correspondant à une phase d’approche (de -6 s à -2 s) et à une phase terminale (deux dernières secondes avant
l’interception). Alors que des régulations sont produites dans les deux phases, la part prise par la loi de contrôle dans le processus de contrôle
diffère en fonction de la phase considérée. Nos résultats invalident la mise en œuvre de la loi de contrôle dans la phase d’approche. À
l’inverse, la loi de contrôle pourrait intervenir dans le contrôle de la phase terminale. Les coefficients de corrélation obtenus (.25) nous
incitent à penser néanmoins que la loi de contrôle de Peper et al. (1994) n’est pas suffisamment puissante pour être utilisée en l’état quelle
que soit l’action d’interception considérée. Nos travaux à venir auront pour objectif de proposer une nouvelle formulation de la loi de
contrôle Peper et al. (1994) suffisamment robuste pour rendre compte des régulations produites dans différents types d’action d’interception.
Il s’agira également d’identifier les stratégies qui opèrent (e.g., stratégie de relèvement constant) dans la phase d’approche.
Références :
BOOTSMA R J, FAYT V, ZAAL F T J M, & LAURENT M (1997) On the information-based regulation of movement: Things Wann (1996)
may want to consider. JEP:HPP 23:1282-1289.
DERUGY A, MONTAGNE G, BUEKERS M J, & LAURENT M (2000) The control of locomotion pointing under restricted informational
conditions. Neurosci Let 281:87-90.
PEPER L, BOOTSMA R J, MESTRE D R, & BAKKER F C (1994) Catching balls: How to get the hand to the right place at the right time.
JEP:HPP 20(3):591-612.
1
/
1
100%