ASSERVISSEMENT EN VITESSE D`UN CHARIOT FILOGUIDE f

PSI CHARIOT FILOGUIDE Lycée Paul Valéry
2008/2009
1/8
ASSERVISSEMENT EN VITESSE D’UN CHARIOT FILOGUIDE
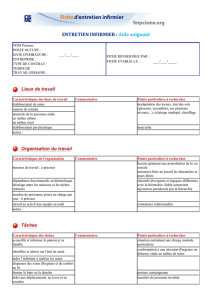
Le chariot filoguidé est utilisé dans le domaine de la transitique (mouvement de marchandises sans conducteur humain). Il suit
le champ magnétique d’un fil parcouru par un courant, et se déplace de poste de travail en poste de travail suivant les ordres
qu’il reçoit. Il est constitué d’un châssis en aluminium et d’un carter en matière plastique. Il se déplace au moyen de trois roues
: deux roues libres en rotation situées à l’arrière, et une roue motrice et directrice située à l’avant.
Pour suivre le champ magnétique du fil, il faut :
- contrôler l’avancement du chariot (asservissement en déplacement de la roue motrice)
- contrôler la trajectoire de la roue (asservissement en orientation de la roue motrice).
Nous étudierons ici seulement le contrôle de l’avancement du chariot asservi en vitesse. La consigne est donc la vitesse de
translation du chariot. Le groupe de motorisation est constitué d’un moteur électrique à courant continu associé à un réducteur
à plusieurs trains d’engrenage. La figure ci-dessous décrit la chaîne d’énergie de l’avancement du chariot filoguidé.
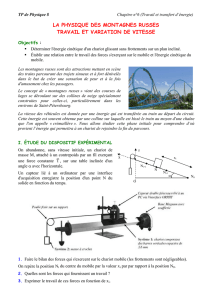
Le schéma représenté Figure 1 modélise le moteur électrique d'entraînement. C'est un moteur à courant continu piloté en
tension. La rotation de l’axe moteur (rotor) par rapport au bâti est paramétrée par l'angle
θ
.
La liaison pivot reliant le rotor au bâti est modélisée avec du frottement fluide de coefficient f
eq
. Ce coefficient équivalent tient
compte de tous les frottements fluide dans la chaîne de transmission de puissance. Ainsi, l’action mécanique transmise par la
liaison pivot est modélisée par le torseur suivant :
{ }
axeldept
eq
axemoteur
fZ
MY
LX
T
'
0
00
00
0
.
∀
→
−
=
θ
&
.
Arrêt
d’urgence
Carter
Châssis
Roue avant
motrice
Roue arrière libre
en rotation
ALIMENTER
CONVERTIR
TRANSMETTRE
Chaîne
d’énergie
Charge à un
emplacement n
Alimenter en
énergie
(12 V 2,5 Ah)
V
itesse
(génératrice tachymétrique)
Charge à un
emplacement n+1
AGIR
Réducteur
Adapter la vitesse de
rotation et le couple
Roue
Faire avancer le
chariot
la roue
Moteur électrique
MCC
Convertir l’énergie
électrique en énergie
mécanique
Hacheur
Distribuer
l’énergie
électrique au
moteur
DISTRIBUER
Ba
tterie

PSI CHARIOT FILOGUIDE Lycée Paul Valéry
2008/2009
2/8
Une génératrice tachymétrique placée sur l’axe du moteur permet de mesurer la vitesse de rotation
m
ω
du moteur. Son gain
est appelé
GT
K
et vaut 0.015 V/(rad/s).
R L
u(t)
i(t)
e
b
(t)
f
eq
J
eq
Cr(t)
e
R
(t)
e
L
(t)
Figure 1 : Schéma synoptique du moteur électrique d'entraînement
Le comportement électromécanique du moteur à courant continu est régit par les deux équations suivantes :
Force contre électromotrice :
)(.)( tkte
mb
ω
=
Couple moteur :
)()( tiktC
m
=
L’ensemble des pièces en mouvement (axe moteur, pignons et roues du réducteur, roue avant, châssis du chariot) est
modélisé par une masse montée au bout de l’axe moteur. Le moment d’inertie de cette masse sur l’axe de la rotation du
moteur est appelé moment d’inertie équivalent et est noté
éq
J
. Le moment d’inertie de l’axe du moteur seul est noté
m
J
.
Toutes les caractéristiques du moteur sont données en annexe 4.
Le couple résistant
)(tC
r
représente la projection sur l’axe du moteur des moments des efforts résistant à l’avancement du
chariot (frottement au sol, résistance au roulement, éventuels effets aérodynamiques, effets de la pente…). Cette perturbation
sera considérée constante :
0
)(
rr
CtC =
N.m.
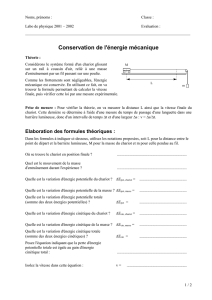
Les annexes 1 et 2 représentent le groupe de motorisation du chariot. L’annexe 2 décrit dans le détail le réducteur de vitesse
à train d’engrenages. Le nombre de dents Zi de chaque roue est indiqué dans le tableau de l’annexe 2. Les moments d’inertie
de toutes ces roues dentées seront considérés négligeables devant celui de l’axe du moteur.
La roue avant motrice a un diamètre
d
de 8 cm. Son moment d’inertie par rapport à l’axe de sa rotation sera considéré
négligeable devant celui de l’axe du moteur. Le chariot a une masse à vide notée
c
m
de 7.5 kg. Cette masse comprend
toutes les pièces constituants le chariot filoguidé.
PARTIE I : MODELISATION
1. En étudiant le réducteur de vitesse, déterminer le rapport de réduction
ρ
entre la vitesse de rotation du moteur
m
ω
et la vitesse de rotation de la roue
26
ω
en fonction du nombre de dents des différentes roues:
m
ω
ω
ρ
26
=
. Faire
l’application numérique.
2. Déterminer la relation entre la vitesse de translation du chariot
)(tv
et la vitesse de rotation du moteur
m
ω
.
Compléter en partie le schéma bloc de l’asservissement en vitesse du chariot (annexe 5).
3. Déterminer l’énergie cinétique de l’ensemble des pièces en mouvement en fonction de
m
J
,
c
m
,
ρ
,
d
et
θ
. En
déduire le moment d’inertie équivalent ramené sur l’axe du moteur
éq
J
. Faire l’application numérique.
4. En isolant l’axe du moteur et la masse équivalent, écrire l’équation du théorème du moment dynamique en projection
sur l’axe de la rotation du moteur.
5. Ecrire l’équation électrique du moteur.
6. A l’aide des équations précédentes et des équations électromécaniques du moteur, compléter en partie le schéma bloc
de l’asservissement en vitesse du chariot (annexe 5).
La génératrice tachymétrique, de gain
GT
K
, montée sur l ‘axe moteur permet de mesurer la vitesse de rotation du moteur.

PSI CHARIOT FILOGUIDE Lycée Paul Valéry
2008/2009
3/8
7. Afin de comparer la vitesse de translation de consigne
)(tv
C
à la vitesse de translation du chariot
)(tv
, compléter
le retour du schéma bloc de l’annexe 5.
8. Afin de réaliser un système asservi, compléter le bloc du gain d’adaptation du schéma bloc de l’annexe 5.
PARTIE II : ETUDE DU COMPORTEMENT
Dans cette partie nous négligerons l’inductance du moteur
L
.
Le coefficient du frottement fluide équivalent est :
sradmNf
eq
...10.3,2
16 −−
=
.
Fonctionnement en boucle ouverte : système non asservi
9. Déterminer les fonctions transferts
(
)
pH
1
et
(
)
pH
2
permettant de définir la vitesse de translation du chariot en
fonction de la tension moteur et du couple résistant :
(
)
(
)
(
)
(
)
)(..
21
pCpHpUpHpV
r
−=
. Mettre ces fonctions
transferts sous forme canonique et donner leurs paramètres caractéristiques.
10. Sur un trajet en ligne droite à vitesse constante et sur un sol de pente nulle, déterminer la tension d’alimentation du
moteur pour obtenir une vitesse de translation de 0.16 m/s en régime permanent.
11. A un instant t, le chariot gravit une pente de 20% correspondante à un couple résistant
(
)
mNtc
r
.10.9,2
3−
=
.
Déterminer la diminution de vitesse en régime permanent provoquée par cette perturbation.
Fonctionnement en boucle fermée : système asservi
Nous prendrons un correcteur proportionnel
(
)
C
KpC
=
.
12. Déterminer les fonctions transferts
(
)
pH
3
et
(
)
pH
4
permettant de définir la vitesse de translation du chariot en
fonction de la tension moteur et du couple résistant :
(
)
(
)
(
)
(
)
)(..
43
pCpHpVpHpV
rC
−=
. Mettre ces fonctions
transferts sous forme canonique et donner leurs paramètres caractéristiques.
Trajet plat
13. Déterminer l’expression de la vitesse de translation du chariot pour une consigne de vitesse de 0.16 m/s dans le cas
d’un parcours plat.
14. Dans les mêmes conditions, déterminer l’erreur statique de l’asservissement de vitesse.
15. Déterminer le temps de réponse à 5%.
16. Faire les applications numériques des questions 14 et 15 pour
1=
C
K
puis 10 puis 100.
17. Déterminer la tension d’alimentation du moteur pour les mêmes valeurs de
C
K
pour assurer cet asservissement.
Conclusions ?
Pente de 20%
18. A un instant t, le chariot gravit une pente de 20% correspondante à un couple résistant
(
)
mNtc
r
.10.9,2
3−
=
.
Déterminer la diminution de vitesse en régime permanent provoquée par cette perturbation.
19. Faire l’application numérique pour
1=
C
K
puis 10 puis 100.
20. Conclure.

PSI CHARIOT FILOGUIDE Lycée Paul Valéry
2008/2009
4/8
ANNEXE 1 : MOTORISATION

PSI CHARIOT FILOGUIDE Lycée Paul Valéry
2008/2009
5/8
ANNEXE 2 : REDUCTEUR
26 2 Roue dentée Z=55 m=0,6 XC 38
24 2 Roue dentée Z=40 ; Z=11 m=0,6 Cu Zn 38 Pb 2
23 2 Roue dentée Z=10 m=0,6 ; Z=60 m=0,35 DERLIN
22 1 Roue dentée Z=27 m=0,35 ; Z=60 m=0,35 Cu Zn 38 Pb 2
18 1 Axe moteur Maxon DC Motor
17 1 Pignon moteur Z=13 m=0,35 Cu Zn 38 Pb 2
2 1 Roue motrice ref. VPY ∅ 80 12g IMSAP
1 1 Moteur d’entraînement 21-40.931-58.236-050 + codeur Maxon DC Motor
Rep
Nd
Désignation Matière
24
 6
7
8
6
7
8
1
/
8
100%