TD M5 : moment cinétique - e

Mécanique TD-M5-moment-cinetique
TD M5 : moment cinétique
Exercice 4 - mouvement tournant d’une masse accrochée à un ressort ***
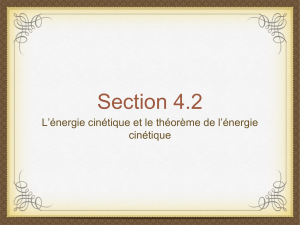
On considère une table à coussin d’air horizontale sur laquelle peut se mouvoir, sans frottement,
un mobile autoporteur de masse maccroché à l’extrémité d’un ressort.
La table forme le plan xOy, l’extrémité fixe
du ressort est située en O.
Ci-contre, un schéma représente le dispositif
vu de dessus.
Le champ de pesanteur est dirigé suivant
-Oz :
−→
g
=
−g−→
uz
. Le ressort a pour
constante de raideur
k
et une longueur à
vide `0.
O
•M
x
y
−→
ux
−→
uy
−→
uz
ω t
Figure 1 – Mobile autoporteur accroché à
un ressort sur une table à coussin d’air
horizontale
1.
Faire un bilan des forces et montrer qu’il y a conservation du moment cinétique du point M
par rapport à O.
2.
A
t
= 0, on lâche le point M depuis l’axe des abscisses, le ressort ayant pour longueur 1
.
2
fois sa longueur à vide : −−→
OM(t= 0) = 1.2`0−→
ux; et une vitesse initiale nulle.
2.1.
Calculer le moment cinétique par rapport à O du point M. En déduire la nature de la
trajectoire.
2.2.
En utilisant la relation fondamentale de la dynamique, établir l’expression de
OM
(
t
)et
préciser dans quel intervalle cette longueur évolue.
Indices
—
Si une équation différentielle possède un second membre, il ne faut pas oublier de trouver une
solution particulière de même forme que le second membre ;
—
Une équation différentielle du type
x
+
ω2
0x
= 0 admet une solution d’expression
x
(
t
) =
Acos ω0t
+
Bsin ω0t. Les conditions initiales permettent de déterminer Aet B.
3.
On lance à présent le mobile autoporteur pour lui donner un mouvement de rotation autour
de l’axe Oz. Ainsi, on a :
—−−→
OM(t= 0) = `1−→
ux;
—−→
v0=`1ω−→
uy.
Le mouvement étant toujours plan, on pourra travailler soit en coordonnées cartésiennes
soit en coordonnées polaires.
3.1.
Exprimer le moment cinétique par rapport à O du mobile autoporteur : d’abord en
fonction de ret
θ, puis en fonction des conditions initiales.
Indice
Les forces qui s’exercent sur le mobile, donc leur moment, n’ont pas changées.
3.2. Montrer qu’il y a conservation de l’énergie mécanique du mobile.
Indice
Écrire le théorème de l’énergie cinétique sur un déplacement élémentaire du mobile.
1

Mécanique TD-M5-moment-cinetique
3.3.
Rappeler l’expression de l’énergie potentielle élastique puis donner l’expression de
l’énergie mécanique en fonction :
— Des conditions initiales ;
— De r,
r,
θ,m,ket `0.
3.4.
Montrer que cette énergie peut être écrite sous la forme
Em
=
1
2m
r2
+
Epeff
(
r
)où
Epeff
est appelée énergie potentielle effective et est fonction de
r
et de
L
, norme du vecteur
moment cinétique.
Donner son expression.
3.5.
Tracer l’allure de la fonction
Epeff
(
r
)et en déduire pourquoi la masse ne peut pas
s’éloigner du pôle d’attraction O.
Solution
1.
On travaille dans le référentiel du laboratoire considéré comme galiléen. Le système étudié
est le mobile autoporteur de masse m.
Les forces qui s’exercent sur M sont :
—
Son poids
−→
P
, orthogonal à la table à coussin d’air car celle-ci est horizontale, dirigé
selon −−→
uz;
—
La réaction de la table
−→
R
, orthogonale à la table à coussin d’air car il n’y a pas de
frottement, dirigée selon −→
uz;
— La force de rappel −→
Tdu ressort dirigée suivant −−−→
OM.
Les deux premières forces se compensent, la troisième étant colinéaire à
−−→
OM
, a un moment
par rapport à O,
−−→
OM ∧−→
T
, qui est nul. Ainsi l’application du théorème du moment cinétique
donne :
d−→
LO
dt=−−→
OM ∧−→
P+−−→
OM ∧−→
R+−−→
OM ∧−→
T=−−→
OM ∧(−→
P+−→
R) + −→
0 = −→
0(1)
Donc −→
LO=−−→
cste. Il y a bien conservation du moment cinétique de M en O.
2. Lâcher rectiligne :
2.1.
Si le moment cinétique se conserve, il a à tout instant la même valeur qu’il avait
initialement.
Or, initialement :
−→
LO(t= 0) = −−→
OM(t= 0) ∧m−→
v(t= 0) = m OM(t= 0) v(t= 0) sin (\
OM,v)−→
uz=−→
0
car le mobile M est lâché sans vitesse initiale.
Le moment cinétique étant nul à tout instant, le mobile est lâché sur l’axe Ox, il va
donc y rester et la trajectoire est rectiligne suivant l’axe Ox.
2.2. Le PFD donne :
m−→
a=X−−→
Fext =−→
P+−→
R+−→
T(2)
On projette cette relation suivant l’axe Ox pour obtenir l’équation différentielle du
mouvement de M :
m
x=T=−k(`−`0)(3)
Or ici, −−→
OM(t) = `=x:
m
x=−k x +k`0⇐⇒
x+k
mx= + k
m`0(4)
2

Mécanique TD-M5-moment-cinetique
On pose ω2
0=k
m. Alors l’équation devient :
x+ω2
0x=ω2
0`0(5)
Cette équation a pour solution particulière
xp
=
`0
et pour solution de l’équation
homogène : xh(t) = Acos ω0t+Bsin ω0t. La solution globale est donc :
x(t) = Acos ω0t+Bsin ω0t+`0(6)
On trouve Aet Ben utilisant les conditions initiales :
—x(t= 0) = 1.2`0=A+`0⇐⇒ A= 0.2`0.
— Dérivons x(t)pour obtenir l’expression de la vitesse :
x(t) = −A ω0sin ω0t+B ω0cos ω0t(7)
Le mobile M est lâché sans vitesse initiale :
x(t= 0) = 0 = B ω0⇐⇒ B= 0 (8)
Finalement x(t) = OM(t)a pour expression : x(t) = 0.2`0cos ω0t+`0.
La longueur du ressort varie donc entre 0.8`0et 1.2`0.
3. Mouvement de rotation
3.1. Expression du moment cinétique en fonction de ret
θ:
−→
LO=−−→
OM ∧m−→
vM=m
r
r0
0∧r
θ= 0
0 0 m r2
θ
(9)
Expression du moment cinétique en fonction des conditions initiales :
On a vu précédemment que le moment cinétique était une constante, il a donc à tout
instant la valeur qu’il a à l’instant t= 0. Donc :
−→
LO=−−→
OM(t= 0) ∧m−→
v0=m
`10 0
0∧`1ω= 0
0 0 m `2
1ω
(10)
3.2. Écrivons le théorème de l’énergie cinétique sur un déplacement élémentaire :
dEc=δW =δW (−→
P) + δW (−→
R) + δW (−→
T)(11)
Or le poids et la réaction du support sont perpendiculaires au déplacement élémentaire
du mobile, elle ne travaille donc pas. Donc :
dEc=δW (−→
T) = −dEpél (12)
Car la force de rappel d’un ressort est conservative (son travail de dépend pas du
chemin suivi), elle dérive donc d’une énergie potentielle appelée énergie potentielle
élastique.
Alors :
dEc+ dEpél = 0 ⇐⇒ dEm= 0 ⇐⇒ Em= cste (13)
3

Mécanique TD-M5-moment-cinetique
3.3. L’énergie potentielle élastique s’écrit :
Epél =1
2k(`−`0)2(14)
On ajoute donc à cette énergie l’énergie cinétique pour obtenir l’énergie mécanique :
— En fonction des conditions initiales :
Em=Ec+Epél =1
2m `2
1ω2+1
2k(`1−`0)2(15)
— En fonction des coordonnées polaires :
Em=Ec+Epél =1
2m
r2+r2
θ
2!+1
2k(r−`0)2(16)
En effet, pour l’expression de l’énergie cinétique,
−→
v
=
r−→
ur
+
r
θ−→
eθ
donc
v2
=
r2+r2
θ
2
.
3.4.
On a
L
=
m r2
θ
donc
θ
=
L
m r2
que l’on peut remplacer dans l’expression de
Em
en
coordonnées polaires :
Em=1
2m
r2+1
2m r2L2
m2r4+1
2k(r−`0)2(17)
⇐⇒ Em=1
2m
r2+Epeff (18)
avec Epeff =L2
2m r2+1
2k(r−`0)2(19)
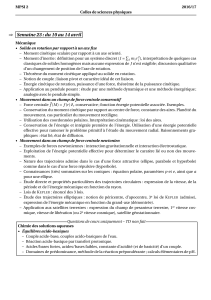
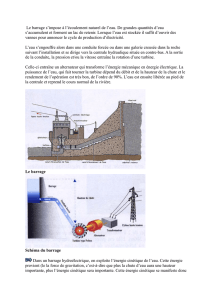
3.5. Voici l’évolution de la courbe Epeff (r):
EPeff (r)
r
0
EM
rmin rmax
Figure 2 – Évolution de l’énergie
potentielle effective du mobile en
fonction de r
D’après l’expression de l’énergie mécanique,
Em
=
1
2m
r2
+
Epeff
(
r
), comme
m
r2>
0,
alors Em≥Epeff (r).
D’après la courbe, la zone de mouvement du mobile se situe en dessous de la droite
Emc’est à dire entre deux positions rmin et rmax.
Le mobile ne peut pas s’éloigner à l’infini.
4
1
/
4
100%