Mécanique Mechanics

Mécanique
Mechanics
Ref :
A332 045
Français – p 1
English – p 3
Version : 7002
Banc de mécanique
Composition détaillée
Mechanical bench
Itemized composition

Mécanique
Banc de mécanique
composition détaillée
Ref :
A332 045
FRANÇAIS 1
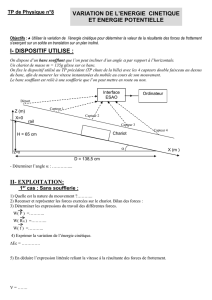
1 Composition
Le banc de mécanique est composé de :
- 1 rail avec pieds supports,
- 8 clips de fixation (montés sur le rail),
- mires sur tige (montées sur clips),
- ensembles butées mobiles (montées sur clips),
- 2 mâts de 1 m,
- 1 notice.
2 Service après vente
La garantie est de 2 ans, le matériel doit être retourné dans nos ateliers.
Pour toutes réparations, réglages ou pièces détachées, veuillez contacter :
JEULIN - SUPPORT TECHNIQUE
Rue Jacques Monod
BP 1900
27 019 EVREUX CEDEX FRANCE
+33 (0)2 32 29 40 50

Mécanique
Banc de mécanique
composition détaillée
Ref :
A332 045
FRANÇAIS 2
NOTES

Mechanics
Mechanical bench
Itemized composition
Ref :
A 332 045
ENGLISH 3
1 Composition
The mechanical bench is composed of:
- 1 rail with feet supports,
- 8 clips of fixing (gone up on the rail),
- Test cards on stem (gone up on clips),
- Sets movable stop (rises on clips),
- 2 masts of 1 m,
- 1 note.
2 After-Sales Services
This material is under a two year warranty and should be returned to our
stores in the event of any defects.
For any repairs, adjustments or spare parts, please contact:
JEULIN - TECHNICAL SUPPORT
Rue Jacques Monod
BP 1900
27 019 EVREUX CEDEX FRANCE
+33 (0)2 32 29 40 50

Mechanics
Mechanical bench
Itemized composition
Ref :
A 332 045
ENGLISH 4
NOTES
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
1
/
166
100%