Machines synchrones

Machines synchrones
• 1
Machines synchrones
Gérard-André CAPOLINO

Machines synchrones
• 2
Machines synchrones
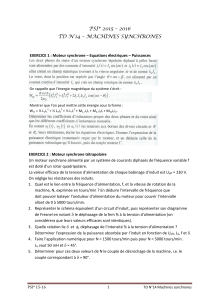
Machine à pôles lisses
• Le stator est un circuit
magnétique circulaire
encoché
• Un bobinage triphasé est
placé dans les encoches
• Le rotor est également un
circuit magnétique
circulaire
• Un enroulement continu
multi-polaire est placé
dans des encoches au
rotor
Concept (machine à 2 pôles)
N
S
A
-
B
+
A
+
C
+
C
-
B
-
A
B
C
Stator
Encoches
et bobines
Rotor avec
bobinage continu

Machines synchrones
• 3
Machines synchrones
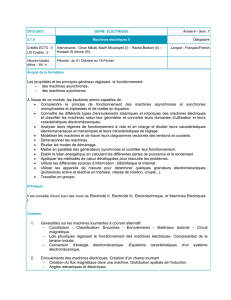
Machine à pôles saillants
• Le stator a un circuit magnétique
encoché avec un bobinage
triphasé
• Le rotor a des pôles saillants
• Un courant continu alimente le
rotor à travers des bagues et des
balais
• Le nombre de pôles varie de 2 à
128 ou plus
•Concept (machine à 2 pôles)
N
S
A
+
B
+
C
+
B
-
A
-
C
-

Machines synchrones
• 4
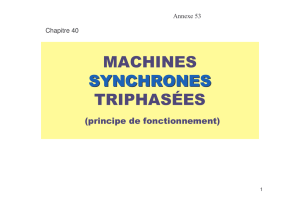
Machines synchrones
Stator Rotor
Connections
Roulement
à billes Bobinage stator
Bobinage rotor
Carcasse et conduit
de refroidissement
Arbre

Machines synchrones
• 5
Machines synchrones
Construction
• La figure montre le circuit
magnétique avec le bobinage
• Le bobinage consiste en des barres
de cuivre isolé avec du mica et de la
résine epoxy
• Les conducteurs sont maintenus par
des cales d’acier
• Dans les machines de grande
dimension le stator est refroidi par
du liquide
Construction
encoches
vides
Bobines
isolées
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
1
/
56
100%