Sujet de thèse - Micromanipulation et fonction de surfaces - Femto-ST

--- Sujet de thèse ---
Modélisation, expérimentation et optimisation de systèmes de micronanomanipulation par
electrophorèse, exploitant les fonctionnalisations de surfaces
Proposé par : Nicolas Chaillet, prof. d’université UFC (FEMTO-ST) , Michaël Gauthier, CR
CNRS (FEMTO-ST) et Sophie Lakard, maître de conférence, UFC (UTINAM).
Contexte scientifique
L’impact des avancées en robotique de manipulation à l’échelle des micro et nanotechnologies
s’appréhende en mesurant le fossé dimensionnel qu’il existe entre le nanomètre et le millimètre
couvrant six ordres de grandeur. Ainsi, les dix dernières années ont vu émerger des solutions de
micromanipulation aux alentours de 50 micromètres dans les laboratoires académiques et qui
trouvent aujourd’hui un écho industriel dans l’instrumentation scientifique et la micromécanique
(Percipio-Robotics, Thalès) ou en microélectronique (NXP, ST microelectronics, Beam Express) avec
l’apparition des composants 3D (3D-STACK).
A l’avenir, les fonctions réalisées à base essentiellement de nanotechnologies devront pouvoir être
assemblées pour construire un composant fonctionnel intégré, voire intelligent. Afin de préparer ce
marché, il est nécessaire que les équipes de recherche académiques micro-nanorobotique
investiguent désormais une échelle dimensionnelle en avance sur les préoccupations industrielles
quotidiennes et se positionnent sur l’espace libre laissé entre nanomanipulation et
micromanipulation situé entre 100nm et 10µm. La capacité d’assemblage dans cet espace
dimensionnel est un point clé du développement de futurs produits complexes basés sur des
nanotechnologies.
Ce sujet de thèse porte sur l’étude d’une méthode basée sur l’exploitation d’un couplage entre
l’électrophorèse (microtechnologie) et la chimie des surfaces (nanotechnologie) pour réaliser des
opérations de micronanomanipulation.
Contexte collaboratif et environnement.
Ce sujet de thèse pluridisciplinaire sera réalisé en co-encadrement entre l’institut FEMTO-ST (dept.
AS2M) et l’institut UTINAM. La présence sur le site de Besançon des compétences en
micromanipulation reconnue sur le plan international (FEMTO-ST) [1,2] et de compétences en
maîtrise et analyse de la chimie des surfaces (UTINAM) crée un environnement particulièrement
favorable à l’étude de moyens de micronanomanipulation exploitant la chimie des surfaces. De plus,
de premiers travaux exploratoires ont d’ores et déjà été menés entre les deux laboratoires montrant
la pertinence et la faisabilité de ces approches couplées [3-5].
De plus, ce sujet est basé sur des compétences en modélisation de trajectoires d’objets dans des
champs électriques à l’échelle micrométrique précédemment développées à l’institut FEMTO-ST [6].
Ce sujet de thèse est également complémentaire d’un projet ANR qui sera déposé prochainement en
collaboration avec l’institut ISIR à Paris et le laboratoire franco-japonais LIMMS situé à Tokyo sur le
« nano-assemblage ».
Enfin, le positionnement scientifique de ce sujet porte sur la thématique micronanorobotique du
projet de laboratoire d’excellence ROBOTEX.

Objectifs et approches
L’objectif est de positionner des micronano-objets d’une taille typiquement de l’ordre du micromètre
en vue de réaliser un assemblage. L’approche retenue consiste à utiliser un moyen de
positionnement sans contact de façon à éviter les problèmes d’adhésion inhérents à cette échelle.
L’utilisation d’un champ électrique est à même d’assurer un positionnement des micronano-objets
mais cet effet est dépendant des densités de charges électriques sur les micro-objets qui ne sont pas
actuellement contrôlées. Or, l’interaction entre une surface chimiquement fonctionnalisée et un
milieu ionique est à même de contrôler la densité de charge sur un micro-objet (par exemple, la
présence d’une fonction amine à pH acide induit une charge de surface positive par protonation [7-
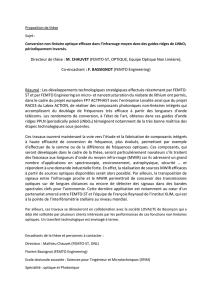
8]). Ainsi l’approche proposée consiste à maîtriser les conditions limites du problème électrique
(densité surfacique de charges) à l’aide de procédés de fonctionnalisations chimiques (voir figure ci-
dessous).
L’intérêt de cette méthode est qu’elle permet de maîtriser la position et la quantité de charges de
surface sur l’objet à manipuler permettant de contrôler la position de la force électrostatique
appliquée à l’objet. De plus, la modification des paramètres chimiques (ex. pH du milieu) au cours du
temps permettra de modifier la densité de charge de surface et donc le point d’application de la
force appliquée créant un moyen de manipulation d’une grande dextérité.
Contenu des travaux :
Les travaux de thèse porteront premièrement sur une modélisation du principe retenu et du
couplage entre l’équilibre électrochimique avec la surface fonctionnalisée et l’établissement du
champ électrique dans l’espace. L’impact de la présence du champ électrique sur l’équilibre
électrochimique devra être analysé et quantifié.
La deuxième phase envisagée porte sur une expérimentation sur quelques cas tests d’objets
possédant des fonctionnalisations chimiques locales dans des champs électriques. Ces
expérimentations permettront de valider par des mesures de trajectoire ou de force la pertinence
des modèles développés.
Sur la base de ces modèles, des méthodes d’optimisation pourront être proposées pour la
conception de systèmes de micromanipulation exploitant ce principe. En fonction de l’opération
souhaitée, un choix de champ électrique et de localisation des fonctionnalisations pourra alors être
proposé.
[1] M. Gauthier, S. Régnier, ‘Robotic micro-assembly’, IEEE Press, Wiley Edition, 320 pages, ISBN:9780470484173, 2010.
[2] N. Chaillet, S. Régnier, ‘Microrobotics for Micromanipulation’, Wiley Edition, 512 pages, ISBN-10: 1-84821-186-4, 2010.
[3] J. Dejeu, A. Et Taouilb, P. Rougeot, S. Lakard, F. Lallemand and B. Lakard, Morphological and adhesive properties of polypyrrole films synthesized by sonoelectrochemical technique,
Synthetic Metals, In Press, 2010.
[4] C. Lebrun et L. Bidal, Fonctionnalisation de surfaces par des polymères en vue d’applications en robotique, rapport de stage L3, co-encadré entre UTINAM et FEMTO-ST, 2010.
[5] I. Amoud, Fonctionnalisation de surfaces par des polymères en vue d’applications en robotique, rapport de stage M1, co-encadré entre UTINAM et FEMTO-ST, 2010.
[6] M. Kharboutly, M. Gauthier, N. Chaillet, Modeling the trajectory of a micro-particle in a dielectrophoresis device. Journal of Applied Physics, 2009.
[7] J. Dejeu, M. Gauthier, P. Rougeot, W. Boireau, Adhesion forces controlled by chemical self-assembly and pH, application to robotic microhandling, ACS App. Mat. & Interfaces, 2009.
[8] J. Dejeu, P. Rougeot, M. Gauthier, W. Boireau, Reduction of micro-object's adhesion using chemical functionnalisation, in MicroNano Letters, 2009.
équilibre chimique
charges électrostatiques
locales
champ
électrique
1
/
2
100%