Rapport d`activité 2013 du projet P1125 MOdélisation Cinétique de

1
Rapport d’activité 2013 du projet P1125
MOdélisation Cinétique de Plasmas sur Supercalculateur dans le
contexte de sources d’ions- MOCIPS
Ce projet est dédié à l’étude du fonctionnement d’une source d’ions de type propulseur
de Hall. Ces moteurs possèdent une géométrie cylindrique. Le plasma est créé entre deux
cylindres concentriques dont les parois sont constituées de matériaux céramiques. Une
cathode extérieure fournit le courant électronique nécessaire d’une part à l’amorçage du
plasma et d’autre part à la neutralisation du faisceau ionique afin que le satellite ne se charge.
Une différence de potentiel est appliquée entre une anode située au fond du canal et la cathode
externe. La particularité de ce type de propulseur est de ne pas utiliser de grilles extractrices
pour extraire les ions de la décharge. Un champ magnétique est utilisé afin de baisser la
conductivité dans le plasma pour faire pénétrer le champ électrique au cœur du plasma, ce qui
va permettre de chauffer les électrons et d’extraire les ions du canal. Le xénon, gaz neutre
facilement ionisable, est injecté à travers l’anode.
Ces propulseurs sont utilisés dans le domaine spatial pour le maintien en poste ainsi que
les transferts d’orbites de satellites ou de sondes. Leur intérêt majeur réside dans une
utilisation moindre de carburant contrairement aux solutions plus coûteuse de type chimique.
Pourtant, malgré 40 années de recherche et de nombreuses expériences en vol qui ont prouvé
leur efficacité, il reste de nombreuses zones d’ombre dans leur fonctionnement. En particulier,
le transport des électrons à travers la barrière de champ magnétique est mal compris. Nos
efforts visent donc à travers la simulation numérique à clarifier la physique responsable de ce
transport.
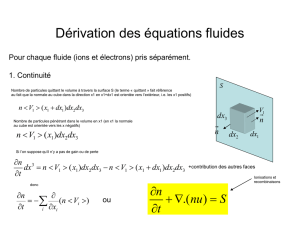
La géométrie du domaine de calcul est présentée sur la Figure 1a. La taille du domaine
est de 4 cm (suivant x) par 2 cm (suivant y). Notre modèle est basé sur une approche de type
PIC (« Particle-In-Cell ») qui consiste à coupler les équations du mouvement des particules
chargées (électrons et ions xénon une fois chargé) à l’équation de Poisson qui permet de
calculer le champ électrique. Le champ magnétique est supposé appliqué ; le champ
magnétique induit par le plasma est négligeable. Seuls les électrons sont impactés par la
présence du champ magnétique. Les ions du fait de leur plus large masse ne sont pas
magnétisés. Notre modèle décrit les dimensions azimutale et axiale. Notons que nous ne
résolvons pas tout l’azimut mais seulement une partie de celui-ci afin de réduire le temps de
calcul. Des conditions périodiques sont appliquées pour les particules et le potentiel électrique
sur les frontières nord et sud (voir Fig. 1b). Les électrons sont injectés à travers le plan
cathodique situé à x = 4 cm suivant une fonction de distribution maxwellienne dont la
température est de 2 eV. Les conditions aux limites pour les plans x = 0 et x = 4 cm sont de
type Dirichlet ; avec à un potentiel de 300 et 0 V, respectivement. Les particules chargées
sortant du domaine de simulation à travers les frontières est et ouest sont éliminées. Le
nombre d’électrons à injecter à chaque pas de temps est calculé à partir de la différence de
charges quittant le domaine de simulation. Le champ magnétique est dirigé suivant la
direction z perpendiculaire au domaine de calcul. Un système d’équations de type fluide à une
dimension est utilisé pour calculer le transport des atomes de xénon. Le plan de sortie
positionné à x = 2.5 cm correspond au pic de champ magnétique. Uniquement des collisions

2
entre les électrons et les atomes sont prises en compte à l’extérieur du canal. A l’intérieur du
canal, s’ajoutent des collisions électron-paroi. Celles-ci sont traitées de manière très simple
puisque la troisième direction z (radiale) n’est pas décrite. Nous calculons une probabilité de
collision à travers une fréquence de collision simplement écrite comme le rapport entre la
vitesse suivant z et la distance entre les parois (2 cm dans nos calculs). Nous supposons une
barrière de potentiel de 20 V. Les électrons dont l’énergie est supérieure à 20 eV font une
collision isotrope avec la paroi, les autres sont réfléchis de manière miroir par la gaine. Les
ions quant à eux sont non collisionnels du fait de leur grande vitesse.
Figure 1 : géométrie et domaine de simulation.
Nous avons décrit dans notre précédent rapport les contraintes inhérentes à la méthode
PIC sur les pas de temps et d’espace. Pour résumer, ceux-ci sont fortement contraints par la
densité de plasma. Les densités de plasma dans notre modèle peuvent dépasser les 1018
particules par m3. Si nous voulons suivre des évolutions sur des temps de simulation de
quelques centaines de microsecondes, cela devient totalement impraticable. Afin de réduire le
temps de calcul, nous avons utilisé une méthode de « scaling » en augmentant la permittivité
du vide (facteur = 80 dans nos simulations). En pratique, cela revient à travailler avec une
densité de plasma plus faible [1], [2]. Pour les conditions typiques utilisées dans nos
simulations, nous arrivons à gagner un ordre de grandeur en pas de temps et d’espace.
Néanmoins, afin d’accélérer encore plus le temps de calcul, nous avons parallélisé notre
modèle en utilisant les techniques de mémoires partagées (OpenMP) et distribuées (MPI).
Typiquement, 4 processeurs avec 4 cœurs sont utilisés sur le calculateur Hyperion du Calmip.
Les temps de calcul deviennent alors raisonnables (de l’ordre de la semaine pour simuler 300
s du fonctionnement du moteur).

3
Nos travaux en 2012 avaient porté sur la compréhension des phénomènes pouvant
expliquer le comportement du moteur, pour un point nominal de fonctionnement. Ces travaux
ont fait l’objet d’une présentation orale lors d’une conférence internationale [3]. Nous avons
souligné l’importance d’une instabilité azimutale (de l’ordre du MHz) qui apparaît à des
instants clés de la décharge, et qui accroît le transport électronique axial. Durant l’année 2013,
nous avons regardé l’influence de la méthode de « scaling » sur les résultats du modèle.
Comme nous l’avons déjà précisé, faire tendre vers 1 n’est pas possible dans le cas de notre
modèle pour des raisons de temps de calcul. Nous avons toutefois noté que le comportement
de l’instabilité est influencé par le coefficient de scaling . Sachant l’importance de cette
instabilité sur le transport électronique, nous avons alors cherché à évaluer son effet. Gary et
Sanderson dans les années 1970 avaient dérivé une équation de dispersion pour un plasma
constitué d’électrons magnétisés et d’ions non magnétisés et non collisionnels [4]. Nous avons
résolu numériquement l’équation de dispersion en prenant en compte le facteur . Ces travaux
très intéressants nous ont permis de mieux comprendre l’instabilité observée dans nos
simulations. Ceci fait l’objet d’une publication soumise à la revue Physics of Plasmas [5].
Philippe Coche dans sa thèse avait observé un comportement différent du moteur pour
un maximum de champ magnétique plus faible (100 G au lieu de 170 G) [2]. Nous avons
continué dans cette direction. Ces derniers résultats font l’objet de ce rapport.
Figure 2 : profil de champ magnétique.
Le profil de champ magnétique est présenté figure 2. Une partie importante du travail a
consisté à définir une taille optimale suivant l’azimut. Il est apparu en effet important
d’agrandir le domaine de simulation puisque le nombre de mode caractérisant l’instabilité que
nous souhaitons étudier était proche de 1 pour une largeur de domaine de 2 cm (suivant
l’azimut). Les simulations présentées ici ont été effectuées pour une largeur de 12 cm.
La figure 3 montre l’évolution temporelle du courant de décharge calculée dans le plan
de sortie (cathodique) à x = 4 cm. La référence t = 0 ne correspond pas au démarrage initial de

4
la simulation mais au début d’un redémarrage. Nous rappelons ici que le fonctionnement du
moteur n’est pas stationnaire, il est sujet à de fortes variations dues à une ionisation du gaz de
manière transitoire (phénomène de type prédateur-proie entre des électrons rapides et atomes
lents [2]).
Figure 3 : variation temporelle du courant de décharge.
Nous montrons dans les figures 4 à 6 les variations de la densité électronique à 3
instants durant la chute de courant. Le maximum de densité électronique décroît, en accord
avec la chute du courant de décharge. A noter que la densité réelle doit être divisée par
(facteur de “scaling” de l’ordre de 100 comme précédemment). Plus intéressant est la forme
du profil de la densité où clairement apparaissent deux instabilités très différentes. La
première couvrant la région à fort champ magnétique (de 2 à 4 cm) est identique à celle
observée à plus fort champ magnétique avec une fréquence de l’ordre du MHz et un nombre
d’onde dans la direction y ky = 3000 rad.s-1 [2], [3], [5]. La seconde, dans la montée du champ
magnétique (avant 2.5 cm), est de l’ordre de 400 kHz avec un nombre d’onde ky variant de
350 à 150 rad.s-1 quand on passe des instants t = 20 à t = 30 s, c’est à dire quand la densité
de plasma chute. Nous devons maintenant étudier cette instabilité de manière plus minutieuse.
Figure 4 : profil de la densité électronique au temps t = 20 s.
Courant de décharge (A)
Temps (s)
Position y (cm)
Position x (cm)
t = 20 s

5
Figure 5 : profil de la densité électronique au temps t = 25 s.
Figure 6 : profil de la densité électronique au temps t = 30 s.
Afin de ne pas avoir de temps de calcul trop longs, nous avons ici utilisé un nombre
limité de particules par cellule. Nos travaux vont se poursuivre en augmentant le nombre de
particules par cellule afin d’améliorer la statistique. Nous allons également étudier le rôle du
gradient de champ magnétique.
Ce travail est soutenu par le GDR CNRS/CNES/Sncema/Universités No. 3161
"Propulsion par Plasma dans l’Espace".
Références :
[1] Rapport d’activité 2012 du projet P1125, MOdélisation Cinétique de Plasmas sur
Supercalculateur dans le contexte de sources d’ions- MOCIPS.
[2] Philippe Coche, « Modélisation Cinétique d’un Propulseur à Effet Hall », thèse de
l’Université de Toulouse, mai 2013.
Position y (cm)
Position x (cm)
t = 25 s
Position y (cm)
Position x (cm)
t = 30 s
 6
6
1
/
6
100%