Op`misa`on dans les télécommunica`ons Alloca`on de

18/03/10
1
!"#$%&'#()*+')&*,-&*
./,/0($$1)%0'#()&*
!2*3(4%,%./*5*3'6&*7898*
:'#'*;'<6=&>?1)&-6*
9/03/10
@1-,A1-&*"6(4,=$-&*+B("#$%&'#()**
• C1*)%D-'1*EFGH**
– C,,(0'#()*+-*I6/A1-)0-&*
– J6(1"'K-*+')&*,-&*6/&-'1L*MN3O*
• C1*)%D-'1*3CP**
– C,,(0'#()*+-&*0')'1L*-)*2N3C*
• C1*)%D-'1*?(1.'K-**
– ?-0Q-60Q-*+1*",1&*0(16.*0Q-$%)*
– ?(1.'K-*+B1)*R(.*+B%)I(6$'#()*&16*1)*6/&-'1*6'+%(*$'%,,/*
• C1*)%D-'1*C"",%0'#()*
– E,')%S0'#()*+-*6/&-'1L*$(4%,-&*
– N%$-)&%())-$-).*+B1)*6/&-'1*+-*+%&.6%41#()*+-*0().-)1*
9/03/10
C,,(0'#()*+-*I6/A1-)0-&*
• ?-&&(160-&*T"-0.6',-&*
,%$%./-&O*U-L*H*9VW*0')'1L*
-)*JT3X*9W*0')'1L*-)*
Y87O994Z*
• ?/1#,%&'#()*&"'#',-*+-&*
I6/A1-)0-&*"(16*
'1K$-).-6*,'*0'"'0%./*+1*
6/&-'1*
• P().6'%).-&*"(16*K'6')#6*
1)*P[\*&1]&').*-)*
$%)%$%&').*,-&*
%).-6I/6-)0-&O*
C,,(0'#()*+-*I6/A1-)0-&*U7Z*
• J'6')#6*1)*6'""(6.*&%K)',*^*461%.*&1]&').*H*
• \0*_*\).-6IO*0(>0')',X**
• \'*_*\).-6IO*0')',*'+`'0-).*
• T\a?*_*E?*[*Uab\Z*c*98*+d*-)*Y87O99*
9/03/10

18/03/10
2
C,,(0'#()*+-*I6/A1-)0-&*UeZ*
9/03/10
*C,,(0'#()*+-*I6/A1-)0-&*UfZ*
• *g'*0().6'%).-*&16*,-*T\a?*+(%.*h.6-*6-$",%-*&16*
.(1.-*,'*i()-*+-*&-6D%0-*+1*"(%).*+B'00=&O**
• a/0-&&%.-*+-&*0'6.-&*+-*0(1D-6.16-*j*P',01,&*
0(k.-1LO*C""6(L%$'#()&*"(&&%4,-&*
9/03/10
J6(1"'K-*+')&*,-&*6/&-'1L*MN3*
• ?/&-'1L*("#A1-&*H*
26')&"(6.*"(16*
0Q'A1-*λ*+B1)*.6'S0*
T23>9l*U7Of*J4%.[&Z*
• E6(4,=$-*+1*
K6(1"-$-).*+-&*λ*
A1%*&1%D-).*,-*$h$-*
0Q-$%)*+')&*,-&*
4')+-&*
J6(1"'K-*+')&*,-&*6/&-'1L*MN3*U7Z*
– e*.m"-&*+B/A1%"-$-).*+')&*,-&*)-(1+&*+-*
0($$1)%0'#()*H*
• no!pP*H*?/"/.-16X*
• Mo!pP*H*N/$1,#",-L-*'1*)%D-'1*+-&*,()K1-16&*+B()+-*
-.*0($$1.-*,-&*&%K)'1L*
• do!pP*H*N/$1,#",-L-*'1*)%D-'1*+-&*4')+-&*-.*0($$1.-*
,-&*4')+-&*
• P(k.*+-&*/A1%"-$-).&*^*+/",(m-6*
P(k.Uno!pPZ*q*P(k.Udo!pPZ*q*P(k.UMo!pPZ*
9/03/10

18/03/10
3
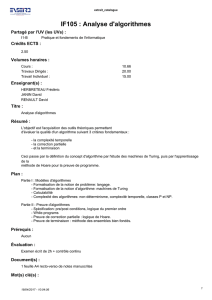
J6(1"'K-*+')&*,-&*6/&-'1L*MN3*UeZ*
• !4`-0#I*+1*"6(4,=$-*H**
• J6(1"-6*'1*$%-1L*,-&*,()K1-16&*+B()+-*+')&*
,-&*4')+-&*-.*,-&*4')+-&*+')&*,-&*S46-&*+-*
I'r()*^*$%)%$%&-6*,-*0(k.*.(.',*+1*+/",(%-$-).*
+-&*)s1+&*+-*0($$1)%0'#()*+1*6/&-'1O**
? ?
?
? ?
F-, B- ou W-OXC ?
F = Min(Sum_OXC Coût(OXC))
9/03/10
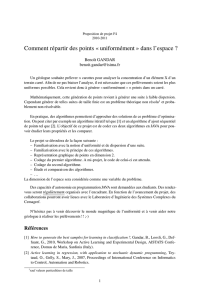
J6(1"'K-*+')&*,-&*6/&-'1L*MN3*UWZ*
C,,(0'#()*+-*0')'1L*2N3C*
U+')&*1)*6/&-'1*0-,,1,'%6-Z*
• !)*'*H**
– t)*-)&-$4,-*+-*:*1#,%&'.-16&*"'6*CEX**
– 26')&$%&&%()*2N3C**
E6(4,=$-*
– Cu6%41-6*^*0Q'A1-*1#,%&'.-16*1)-*I6'0#()*+1*.-$"&*
+-*"'6(,-*λ*+-*I'r()*^*$'L%$%&-6*,-*+/4%.*+-&*
1#,%&'.-16&O**
....
R time slots
K utilisateurs
AP
9/03/10
C,,(0'#()*+-*0')'1L*-)*2N3C*
Channel State Info :
SINR sur chaque slot
9/03/10

18/03/10
4
D
S
di
?-0Q-60Q-*+v1)*",1&*0(16.*0Q-$%)*
• E(16*1)*6(1.'K-*$1,#>&'1.&*H*
*N/.-6$%)-6*1)-*6(1.-*A1%*6-"6/&-).-*1)*",1&*
0(16.*0Q-$%)*-).6-*T*-.*N*"(16*1)-*$/.6%A1-*
0Q(%&%-O**
9/03/10
?-0Q-60Q-*+v1)*",1&*0(16.*0Q-$%)*
• !)*6-"6/&-).-*,-*6/&-'1*"'6*1)*K6'"Q-*
"()+/6/*
• !)*6-0Q-60Q-*&16*,-*K6'"Q-*"()+/6/*,-*0Q-$%)*
"w*A1%*$%)%$%&-*,'*&($$-*+-&*"(%+&**
D
di
S
9/03/10
?(1.'K-*+B1)*R(.*+-*+'.'**
&16*1)*6/&-'1*6'+%(*$'%,,/*
N')&*1)*6/&-'1*0s16*U4'0x4()-Z*&')&>S,&*UeJX*g2yZX*
$1,#>&'1.&*-.*Q'1.*+/4%.*
?/&-'1*"/6%(+%A1-X*1)*&-1,*0')',*6'+%(X*&m)0Q6()-O**
E/6%(+-*+-*.-$"&*+/0(1"/-*-)*%).-6D',,-&*.*_*z9XOO2{*
C*0Q'A1-*"/6%(+-X*0Q'A1-*
"(%).*+B'00=&*%)`-0.-*+-&**
+())/-&*U+-$')+-Z*^**
/0(1,-6*"'6*,-&**
"'&&-6-,,-&*
routeur
AP
IP
Demande
9/03/10
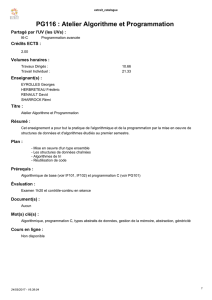
?(1.'K-*+B1)*R(.*+-*+'.'**
&16*1)*6/&-'1*6'+%(*$'%,,/*
• N/.-6$%)-6*,B(6+6-*+B'0#D'#()*+-&*,%-)&*A1%*
"-6$-u-*+-*$'L%$%&-6*,'*0'"'0%./*+1*6/&-'1*
• P'"'0%./*H*g'*A1')#./*+-*R(.*A1-*"-1.*6/"'6#6*
/A1%.'4,-$-).*1)-*.("(,(K%-*+())/-*^*0Q'A1-*
1#,%&'.-16*A1B-,,-*&-6.*H*
routeur
AP
t=1
1
1
1
1
2
2
2
3
3
3
4
4
4
Max capacité → Min Période T
9/03/10

18/03/10
5
9/03/10
E,')%S0'#()*+-*6/&-'1L*$(4%,-&O*
• !"#$"%#$"&'"&()&*+,-.+/&'",&01"2"3%,&*+3%&
+45"/-%&3/"&63)(-57&'"&8"%9-#"&'+//7"&
:#+39"%53%";&-/5"%<7%"/#",;&'74-5=>&?&&
E1
E2
E3
E4
Zone de
Couverture de E1
E,')%S0'#()*+-*6/&-'1L*$(4%,-&*
E,1&%-16&*"6(4,/$'#A1-&*H*
j*J'6')#6*1)-*0(1D-6.16-O*
j*J'6')#6*1)*6'""(6.*P[\*$%)%$',O*
j*E6("(&-6*1)-*&(,1#()*A1%*K'6')#.*1)*+/4%.*
+())/*+')&*0-6.'%)-&*"%=0-&O*
j*3%)%$%&-6*,-*)($46-*+v/$-u-16&*-)*.-)').*
0($".-*+-*,'*A1',%./*+-*,'*0(1D-6.16-O*
j*E6("(&-6*1)-*0()SK16'#()*+v/$-u-16&*
("#$',-*"(16*1)*&-6D%0-*+-*,(0',%&'#()O*
9/03/10
N%$-)&%())-$-).*+B1)*6/&-'1*+-**
+%&.6%41#()*+-*0().-)1*
9/03/10
N%$-)&%())-$-).*+B1)*6/&-'1*+-**
+%&.6%41#()*+-*0().-)1*
• E(16*I(16)%6*1)*$-%,,-16*&-6D%0-X*()*
+/",(%-*1)*-)&-$4,-*+-*&-6D-16&*B6-,'%&B*-.*
()*$1.1',%&-*,-16*1#,%&'#()O*
9/03/10
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
1
/
34
100%