Conversions électromécaniques

PSI Brizeux Ch. CP2: Conversions électromécaniques 13
CHAPITRE CP2
CHAPITRE CP2
Conversions électromécaniques
Comme nous allons le voir, il est possible (et nécessaire !) de convertir l’énergie électrique en
énergie mécanique et inversement : ceci est réalisé par les moteurs électriques dans le premier cas, et
par les génératrices électromécaniques dans le second.
Une machine pouvant fonctionner tantôt en moteur, tantôt en génératrice est dite réversible et est
appelée transducteur électromécanique.
1. RAPPEL D’ELECTROMAGNETISME : PRINCIPE DE
CONVERSION ELECTROMECANIQUE
1.1 Force de Laplace
Un conducteur comportant des charges mobiles de densité volumique ρm ayant la vitesse
!
vr
par
rapport à un référentiel R’ lié au conducteur et qu’on soumet à un champ magnétique
!
B
permanent
orthogonal à
!
vr
met en œuvre l’effet Hall.
vr
B
EH
Il y a création d’un champ électrostatique
!
EH="vr#B
dit
champ de Hall, tel que le mouvement global des porteurs de
charge reste dans la même direction que
!
vr
.
!
EH
agit sur les charges fixes du réseau de densité ρ = -ρm
(neutralité globale du conducteur). La force élémentaire
s’appliquant sur un élément de volume dτ du conducteur
s’écrit donc :
!
dF ="mvr#B
( )
d$
!
"mvr#B
est la densité volumique de force magnétique.
On peut aussi écrire :
!
dF =j"B
( )
d#
, où
!
j="mvr
est la densité volumique de courant.
Dans le cas d’un conducteur filiforme parcouru par un courant électrique I, l’élément de courant
équivalent à
!
j d"
est
!
I dl
avec
!
dl
colinéaire au conducteur. Cet élément de courant placé dans
!
B
est
donc soumis à la force :
!
dF L=I dl "B
appelée alors force de Laplace
( qui s’applique donc ici sur une portion de conducteur de longueur dl).

PSI Brizeux Ch. CP2: Conversions électromécaniques 14
1.2 Induction
Un élément de circuit filiforme C en mouvement dans le référentiel du laboratoire à la vitesse
!
ve(M)
où règne un champ magnétique permanent
!
B(M)
est siège d’un champ électromoteur
d’induction
!
Em=ve(M) "B(M)
.
Pour un tronçon AB de ce conducteur, e =
!
r
E
m.d
r
l
AB
"
est la f.é.m. d’induction
1.3 Bilan pour un porteur de charge
On se limite au cas
!
B
permanent.
Soit un élément de courant d’un circuit quelconque. On suppose que les porteurs de charge sont de
même type (afin de simplifier les expressions) de charge q et de concentration volumique n.
La force de Lorentz
!
f=q ve+vr
( )
"B
s’exerce sur chaque porteur (
!
ve
étant la vitesse du circuit
par rapport au laboratoire et
!
vr
celle des porteurs par rapport au référentiel lié au conducteur).
La force de Lorentz s’exerçant sur les porteurs de l’élément de courant de volume dτ vaut donc :
!
dF =nq ve+vr
( )
"B d#
Or, la puissance de la force de Lorentz dans le référentiel du laboratoire est nulle.
En effet :
!
dP =dF. ve+vr
( )
=0
, d’où :
!
nq ve+vr
( )
"B .ved#+nq ve+vr
( )
"B .vrd#=0
, soit
!
nq vr"B
( )
.ved#+nq ve"B
( )
.vrd#=0
,
soit finalement :
!
j d" # B
( )
.ve+Em .j d"
( )
=0
Pour un élément de circuit filiforme de longueur dl et parcouru par un courant I, cette relation
s’écrit :
!
Idl "B
( )
.ve+Em .Idl
( )
=0
, soit aussi :
!
dFL.ve+de.I =0
: expression dans laquelle de est la f.é.m. élémentaire induite dans l’élément de
circuit considéré.
Le premier terme représente la puissance élémentaire de la force de Laplace dans le référentiel du
laboratoire (dPL), et le second la puissance électrique fournie par la f.é.m. induite (dPe), avec les
conventions d’orientation généralement utilisées dans le cours sur l’induction et rappelées ci-dessous.
On a donc : dPL + dPe = 0, ce qui donne sur la totalité du circuit : PL + Pe = 0 et qui s’énonce :
I
de

PSI Brizeux Ch. CP2: Conversions électromécaniques 15
Lors du déplacement d’un circuit filiforme dans un champ magnétique permanent, la puissance
électrique fournie par la f.é.m. d’induction est opposée à la puissance mécanique des forces de
Laplace.
Ce résultat est à la base du principe de conversion électromécanique.
1.4 Fonctionnement moteur/générateur. Exemple
Fonctionnement moteur
Une source externe impose un courant i dans un circuit électrique plongeant dans un champ
magnétique
!
B
. La force de Laplace peut mettre tout ou partie de ce circuit en mouvement et peut donc
entraîner une charge mécanique.
La puissance électrique fournie à la source est donc convertie en puissance calorifique (pertes par
effet Joule), en puissance mécanique (dont une partie sous forme de forces de frottement).
Le bilan en régime établi s’écrit : Pelec ext. – PJoule = PLaplace = Pfrott. + Pméca.
Fonctionnement générateur
Une dispositif mécanique extérieur met en mouvement tout ou partie d’un circuit électrique
plongeant dans un champ magnétique
!
B
. Il apparaît donc dans le circuit un champ électromoteur
d’induction qui peut être source de courant électrique si le circuit est fermé sur une charge électrique.
La puissance mécanique fournie est donc convertie en puissance calorifique (frottements
mécaniques) et en puissance électrique (dont une partie éventuellement dissipée par effet Joule).
Le bilan en régime établi s’écrit : Pméca. ext. - Pfrott. = Pelec + PJoule
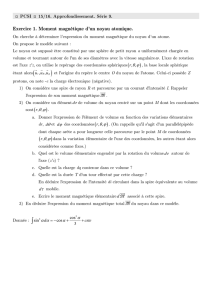
Exemple
On considère le dispositif suivant (dit des « rails de Laplace ») constitué de 2 rails parallèles et
horizontaux, distants de l sur lesquels une tige peut se mouvoir, dans le plan des rails mais
perpendiculairement à ceux-ci. Le tout est plongé dans un champ magnétique
!
B
uniforme et
permanent.
D
P
Q
u
i
l
!
B
!
ux
!
uy
!
uz
On fait se déplacer la barre par une action extérieure à la vitesse
!
v=v uy
constante.

PSI Brizeux Ch. CP2: Conversions électromécaniques 16
♦ Ce conducteur mobile est siège d’un champ électromoteur d’induction
!
Em=v"B=vB ux
Il apparaît donc une f.é.m. e = vBl orientée de P à Q (cf l’orientation du circuit).
Cette barre se comporte comme un générateur et si on ferme le circuit sur un dipôle extérieur D, la
tension qui apparaît aux bornes de celui-ci est u = e – ri, si on appelle r la résistance des rails et de la
barre.
♦ Le conducteur mobile est soumis à la force de Laplace
!
FL=idl"B
P
Q
#=$ilBuy
qui tend à
s’opposer au déplacement de la barre.
♦ La puissance mécanique des forces de Laplace est : PL = -Bilv.
La puissance électrique fournie par la f.é.m. d’induction est : Pe = ei = vBil.
On a bien : PL + Pe = 0.
Effectuons un bilan de puissance pour la barre :
Sa vitesse étant constante, on a : Pméca. ext. – Pfrott. +PL = 0. D’où Pméca. ext = Pfrott. + Pe = Pfrott. + ui + ri2
Pméca. ext = Pfrott. + P élec. + PJ, où Pélec. = ui est la puissance électrique reçue par le dipôle extérieur.
On retrouve bien le bilan de puissance d’un générateur, à savoir : Pméca. ext - Pfrott. = P élec. + PJ
Au bilan électromagnétique réalisant la conversion électromécanique réversible, à savoir
Pméca.ext. = Pélec., se superposent deux phénomènes dissipatifs d’origine électrique et mécanique : l’effet
Joule et les frottements.
Nous allons étudier dans la suite de ce chapitre deux grands types de transducteurs
électromécaniques : les machines à courant continu et les machines alternatives.
2. MACHINES A COURANT CONTINU
Nous allons étudier le principe d’une machine en rotation autour d’un axe – dite machine
tournante – et pour cela commencer par analyser le cas simple du mouvement d’une spire tournant dans
un champ magnétique radial.
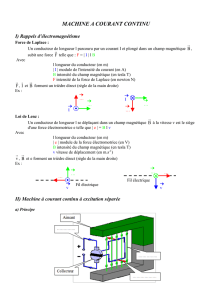
2.1 Principe de fonctionnement : examen du cas
d’une spire tournante
On considère une spire, d’axe colinéaire à
!
u"
(dans le jeu des coordonnées cylindriques) parcourue
par un courant i, placée dans un champ magnétique radial et donc entraînée en rotation autour de
!
uz
à
la vitesse angulaire
!
"=#uz
.

PSI Brizeux Ch. CP2: Conversions électromécaniques 17
!
B
!
uz
i
ligne neutre
pôle sud
pôle nord
!
u"
On suppose
!
B=B(r,")ur
(on néglige les
« effets de bord » et donc la dépendance de B
avec z) tel que :
B(R,θ) = B0 pour
! " 0; #
] [
B(R,θ) = -B0 pour
! " #;2#
] [
B = 0 pour θ = 0 et π.
La ligne neutre est l’intersection avec le
plan de la figure, de la zone de champ
magnétique nul.
Une manière de réaliser un tel champ
magnétique donné sur la figure ci-contre
(entrefer d’un aimant)
On appellera h la longueur (selon
!
uz
) de la
spire et 2R son diamètre.
Aspect mécanique :
!
uz
A
B
C
D
"
Les parties radiales (BC et AD) de la spire
subissent une force de Laplace nulle, puisque
!
B
est
radial.
Sur la partie AB :
!
FL=ihB0u"
Sur la partie CD :
!
F'L=ihB0u' "
avec
!
u' "=#u"
La résultante des forces de Laplace sur la spire
est donc nulle.
Le couple de ces forces par rapport à l’axe
!
uz
est non nul
!
"=2RihB0uz=C
et est appelé
« couple moteur ».
i
!
FL
!
F'L
!
uz
!
B
La puissance des forces de Laplace s’exerçant sur la spire s’écrit :
!
FL.(R"u#)+F'L.(R"u'#)=2R"ihB0=C"=Pm
.
Pm est positive ou négative, selon que i et ω auront même signe ou non.
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%