PWM et Ponts en H: Étude de Cas Rose 2010

´
Etude de cas Rose 2010
PWM ET PONTS EN H
Romain Bichet, Julie Estivie, Etienne Molto et Flavia Tovo
1

Rose 2010 PWM et ponts en H
Table des mati`eres
1 PWM 3
1.1 Principeg´en´eral ........................... 3
1.1.1 Int´erˆet............................. 3
1.1.2 Application.......................... 3
1.1.3 Principe de fonctionnement . . . . . . . . . . . . . . . . . 3
1.2 Application aux STM32 . . . . . . . . . . . . . . . . . . . . . . . 5
2 Les ponts en H 6
2.1 Pour quoi l’utiliser ? . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Comment le pont en H fonctionne-t-il ? . . . . . . . . . . . . . . . 6
2.3 Fonctionnalit´es additionnelles . . . . . . . . . . . . . . . . . . . . 7
2.3.1 Ajout de diodes de roue libre . . . . . . . . . . . . . . . . 7
3 Pilotage d’un pont en H `a l’aide de la PWM 8
3.1 Lockedantiphase........................... 8
3.2 Introduction de dead-time . . . . . . . . . . . . . . . . . . . . . . 8
3.3 Signmagnitude............................ 9
3.4 Phasecorrect ............................. 9
Le 30 mars 2010 2

Rose 2010 PWM et ponts en H
1 PWM
La modulation de largeur d’impulsion (Pulse Width Modulation en anglais)
est une m´ethode permettant de g´en´erer des signaux analogiques continus `a l’aide
de syst`emes en fonctionnement tout ou rien.
1.1 Principe g´en´eral
1.1.1 Int´erˆet
L’int´erˆet du PWM est de pouvoir g´en´erer un signal continu `a partir d’un
syst`eme fonctionnant en tout ou rien. Le principe est d’utiliser le filtre passe-
bas naturel des syst`emes (par exemple la persistance r´etinienne de l’oeil humain,
l’inertie d’un moteur). Ainsi, `a partir d’une succession d’´etats discrets pendant
un temps T, on peut obtenir une valeur continue moyenne pendant ce temps T.
1.1.2 Application
1er exemple : la led
On veut modifier la luminosit´e d’une led. Sur une p´eriode T, on la branche 50%
du temps `a VCC et 50% du temps `a la masse. Si la p´eriode T est suffisamment
petite (ici, on doit avoir Th50ms), l’observateur n’aura pas l’impression que le
led s’allume et s’´eteint, mais que globalement, elle ´eclaire moins que si elle ´etait
tout le temps branch´ee `a VCC. Ainsi, avec une led tricolore rouge-vert-bleu on
pourra g´en´erer n’importe quelle couleur en jouant sur l’intensit´e de chaque led.
Figure 1 – Sch´ema ´electrique d’une led
2`eme exemple : le moteur
Pour contrˆoler la vitesse de rotation d’un moteur, on peut utiliser un PWM.
1.1.3 Principe de fonctionnement
Deux donn´ees sont importantes lorsqu’on veut faire du PWM : la p´eriode
T et le duty cycle d. Le duty cycle est le rapport du temps t pendant lequel
le syst`eme est `a l’´etat haut sur la p´eriode. On a : d=t
T. Ainsi, si l’on a un
syst`eme qui peut g´en´erer un signal `a 0 et un signal `a VCC, pour g´en´erer un
signal continu constant `a V C C
5, on prendra un duty cycle ´egal `a 0,20. Il faut
bien sˆur veiller `a prendre une p´eriode suffisamment courte pour que la fr´equence
Le 30 mars 2010 3

Rose 2010 PWM et ponts en H
de fonctionnement du PWM soit sup´erieure `a la fr´equence de coupure du filtre
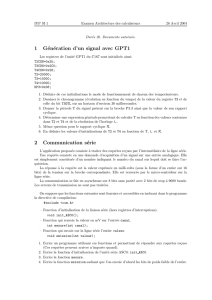
passe-bas naturel du syst`eme utilis´e. Il est aussi possible de g´en´erer un signal
variable, en faisant varier le duty cycle au cours du temps, comme le montre la
figure ci-dessous :
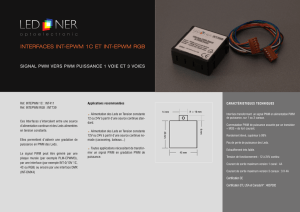
Figure 2 – Un signal et son PWM
En rose, on peut voir le signal effectivement g´en´er´e par le syst`eme. En vert,
on peut voir le signal per¸cu. On voit bien que lorsque la valeur du signal vert
est proche de VCC, le duty cycle est presque ´egal `a 1, et il est presque ´egal `a 0
lorsque la valeur du signal per¸cu est proche de 0.
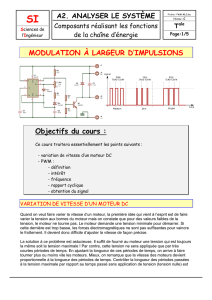
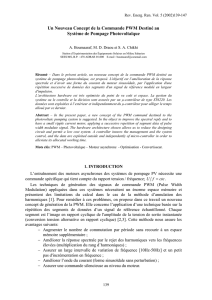
Inversement, on veut pouvoir obtenir le signal vert `a partir d’un PWM. Pour
trouver comment g´en´erer le PWM ad´equat, on peut utiliser un comparateur
simple rampe. La tension `a g´en´erer est compar´ee `a une rampe de p´eriode T (la
p´eriode du PWM) variant de 0 `a VCC. Lorsque la rampe esten-dessous du
signal `a g´en´erer, la tension en sortie du PWM doit ˆetre `a VCC et lorsque le
rampe est au-dessus du PWM, la tension en sortie du PWM doit ˆetre `a 0.
C’est ce que r´esume la figure ci-dessous :
Figure 3 – Un signal et son PWM
Il existe deux modes de PWM :
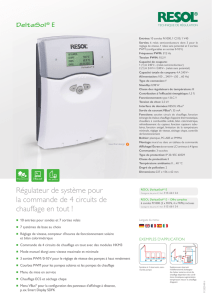
– le mode edge-aligned
A chaque d´ebut de p´eriode, on est dans l’´etat haut. Le signal est donc
asym´etrique par rapport au d´ebut de la p´eriode.
– le mode center-aligned
Au contraire au d´ebut d’une p´eriode on est une fois dans l’´etat haut et la
Le 30 mars 2010 4

Rose 2010 PWM et ponts en H
Figure 4 – Le mode edge-aligned
fois d’apr`es dans l’´etat bas. Le signal a donc l’avantage d’ˆetre sym´etrique
par rapport au d´ebut de la p´eriode.
Figure 5 – Le mode center-aligned
1.2 Application aux STM32
Certains micro-contrˆoleurs STM32 poss`edent des timers avec une fonction-
nalit´e PWM. Pour la mettre en place il suffit de configurer certains registres.
Par exemple, si l’on veut configurer le channel Y du timer X (broche Z) en
PWM, il faut (pour le STM32RCT6) :
– activer l’horloge des fonctions alternatives (bit 1 du registre APB2ENR)
– activer l’horloge du timer X (un bit du registre APB1ENR ou APB2ENR)
– configurer la broche Z en output alternate function (registre GPIOZ→
CRLouGP IOZ →CRH)
– rentrer le prescaler du timer X (registre TIMX→P SC)
– rentrer la p´eriode en nombre de cycles (registre TIMX→ARR)
– rentrer le duty cycle en nombre de cycles (registre TIMX→CCRY )
– choisir le mode 1 ou 2 du PWM (registre TIMX→CCMR1ouT IMX →
CCMR2)
– choisir le mode edge-aligned, center-aligned (registre TIMX→CR1)
Le 30 mars 2010 5
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%