ARTICLE TAIMA2009

Segmentation d’images par LPE 3D
1
Jlassi Hajer, Hamrouni Kamel
2
Ecole Nationale d’Ingénieurs de Tunis (ENIT), Tunis, Tunisia
3
4
5
6
Résumé:
La segmentation 3D est une des étapes les plus importantes pour l’analyse des données d’images. Elle vise à
7
décomposer complètement ou partiellement une image 3D en plusieurs volumes qui possèdent une corrélation forte
8
avec les objets d’intérêt à détecter dans l’image. Elle permet ensuite de visualiser et de quantifier ces surfaces. Dans cet
9
article, nous proposons une nouvelle méthode de segmentation 3D hiérarchique qui consiste a combiné l'algorithme des
10
cascades de S. Beucher et un algorithme de fusions hiérarchisées. Permet, à partir du nombre de régions souhaitées,
11
d'effectuer le nombre d'itérations optimal des cascades, puis de fusionner les régions ainsi obtenues de manière
12
hiérarchisée. Basé sur l'algorithme de cascade /fusion , il fournit une segmentation rapide, robuste et de bonne qualité.
13
14
Mots clés: segmentation 3D, Ligne de partage des eaux, cascades, fusion.
15
16
17
1 Introduction
18
19
La segmentation et l'extraction des contours sont des étapes importantes en analyse d'images. II existe de 20 nombreux algorithmes dans la littérature mais tous génèrent systématiquement une sur-segmentation. L’outil 21 de la LPE constitue une des techniques de segmentation les plus puissantes de la morphologie mathématique. 22 Il consiste à extraire les lignes de crête du module du gradient de l'image afin d'extraire les contours de 23 l'image originale. 24
L'amélioration de la segmentation morphologique revient tout simplement à supprimer certains Contours de 25 la LPE. Comme la qualité de la segmentation est étroitement liée aux minima de l'image gradient, 26 l'élimination de la sur-segmentation passe logiquement par la sélection de certains minima. Deux solutions 27 sont à envisager : soit on supprime les minima non significatifs avant d'appliquer l'algorithme de la LPE, soit 28 on réduit l'effet de sur segmentation après avoir appliqué la LPE. La morphologie mathématique offre des 29 outils très performants dans le premier cas de figure, On recense pour cela trois principales méthodes faisant, 30 toutes appel sans exception, à un même opérateur de la morphologie mathématique qu'on désigne par 31 reconstruction géodésique. 32
2
Etat d’art de la segmentation d’image par LPE2D
33
2.1 Algorithme de la LPE Sous la contrainte des marqueurs 34
Son principe consiste a modifier l'homotopie de l'image gradient de façon à réduire le nombre de ses minima 35 régionaux. Cela fait appel à un marquage des régions que l'on souhaite extraire de l'image. Le marqueur 36 d'une région est un ensemble de pixels connexes situés à l'intérieur de la région. Le principe de la 37 modification d'homotopie du gradient est d'imposer les marqueurs des régions comme minima du gradient en 38 supprimant tous les autres minima indésirables à l'origine de la sur segmentation et de ne conserver entre les 39 marqueurs que les lignes de crêtes les plus é1evées du gradient. En réalité, avec cette technique de marquage, 40 on déplace un problème vers un autre : les méthodes d'extraction des marqueurs sont trop liées à la nature de 41 l'image étudiée. Et souvent, il est indispensable de disposer de connaissances a priori sur les objets à 42 segmenter. 43
2.2 Algorithme de la LPE sous la contrainte de la dynamique des minima 44
L’idée est de supprimer les minima régionaux selon un critère de contraste qu'on appelle dynamique. Un 45 minimum régional est un ensemble de pixels connexes depuis lequel on ne peut atteindre un point d'altitude 46 inférieure par un chemin qui ne remonte pas. La hauteur qu'on est contraint d'escalader est par définition la 47 dynamique du minimum considéré. Elle évalue le contraste du minimum avec son voisinage immédiat. 48
Un filtrage dit en dynamique est alors effectué par reconstruction géodésique en imposant les minima du 49

gradient ayant une dynamique supérieure à un seuil donné comme uniques minima du gradient. Le défaut de 50 cette méthode est la contrainte du choix toujours délicat d'un seuil de la dynamique des minima. 51
2.3 Algorithme des cascades 52
Partant de la simple constatation que les contours détectés par la LPE n'ont pas la même importance, 53 l'idée est d'établir une hiérarchie des minima du gradient de façon a supprimer les régions correspondants aux 54 minima les plus insignifiants. On parle de segmentation hiérarchique, notion introduite par Beucher [3]. 55 Intuitivement, le principe consiste à fusionner les régions voisines dont la cascade d'écoulement d'une région 56 dans l'autre est symétrique par rapport à l'arc frontière les séparant. 57
La fusion des régions s'effectue en sélectionnant de façon automatique des marqueurs au moyen de la 58 reconstruction géodésique. Comparativement à la méthode précédente contrôlée par la différence d'altitude 59 des minima voisins, l'algorithme des cascades est au contraire contrôlé par les hauteurs relatives des lignes de 60 crête du gradient issues de la LPE [1]. Cet algorithme est le plus intéressant des trois car il n'exige aucun 61 réglage de paramètres. 62
3 Segmentation hiérarchique PAR LPE3D
63
3.1
Cascades
64
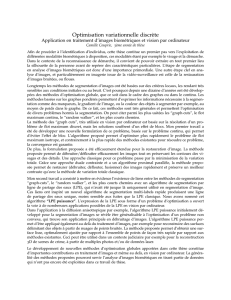
L'algorithme des cascades de S. Beucher [2] consiste à éliminer les bassins non significatifs de la 65 segmentation en classant hiérarchiquement les différentes LPE. Tout d'abord on effectue une LPE et on 66 référence les différents bassins (1, 2, 3, ...., 9). Ensuite on fait monter les eaux depuis le minimum global 67 numéroté 1. Une fois rempli ce dernier se déverse sur le bassin 2. On simule alors la montée des eaux depuis 68 le minimum local du bassin 2 et on constate qu'il se déverse sur le bassin 1. Ce déversement mutuel entraîne 69 une fusion des deux bassins ( Figure1). 70
Figure 1 : Fusions des bassins 1 et 2
71
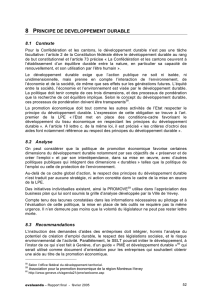
Cette fusion nous indique que la LPE entre les bassins 1 et 2 ne sera pas présente dans le niveau de 72 hiérarchie supérieur. On la détruit pour pouvoir continuer à faire monter les eaux. On continue de la même 73 manière en fusionnant de proche en proche les bassins 3, 4, 5, 6 jusqu'à arriver à un point où le déversement 74 n'est plus mutuel. En effet, la montée des eaux depuis le minimum issu du bassin 7 entraîne un débordement 75 vers un bassin inférieur. La LPE entre 5 et 7 (de même qu'entre 6 et 8) est ainsi conservée, et fera partie du 76 niveau hiérarchique supérieur (Figure 2). 77
Figure 2 : Conservation des LPE pour un déversement non mutuel
78
79 Pour pouvoir itérer l'algorithme et obtenir plusieurs niveaux de hiérarchie différents, deux techniques 80 peuvent être utilisées : la modification d'homotopie et la LPE par graphe des points selles. 81
3.2 Modification d'homotopie
82
Entre deux itérations de l'algorithme des cascades, la modification d'homotopie est une technique qui 83 modifie l'image d'entrée pour que le traitement par LPE ne détecte plus les lignes de segmentation de niveau 84

inférieur. Pour cela, il suffit de "combler" les sous bassins versants. 85
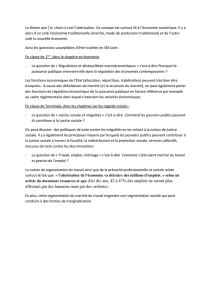
Dans le cas de la 3D, une modification de l’homotopie par la profondeur des bassins se révèle bien plus 86 efficace que par la hauteur du point selle (figure 3). Ce critère a été mis en avant dans les travaux de A. 87 Mangan et al. [5]. 88
Figure 3 : Modification de l'homotopie de l'image d'entrée
89
90 La technique de modification d’homotopie nécessite une reconstruction de l’image d’entrée à chaque 91 itération, ce qui rend le procédé coûteux en temps de calcul. De plus, on rencontre certains problèmes avec 92 cette méthode en 3D lorsqu’on rencontre des zones de LPE larges de plus de 1 vertex, car ces dernières 93 nécessitent plusieurs itérations pour pouvoir être éliminées. Ces « zones de partage » ont été décrites de 94 façon complète par S. Beucher [3]. 95
En éliminant plus rapidement les minima à l’origine des régions les plus petites, la spécification d’une 96 taille minimale pour la création d’une région donne de meilleurs résultats. 97
Les méthodes de courbure par la somme des angles, par la gaussienne et par la Kmin présentent des 98 défauts flagrants (pattes arrières non détectées, régions non significatives conservées, etc.). On vérifiera que 99 les méthodes les plus pertinentes sont celles par covariance et par la courbure principale Kmax. 100
3.3 Graphe des points selles 101
102 Afin de ne pas avoir à reconstruire toute l’image à chaque itération des cascades, il suffit de créer un 103 graphe des points selles de la LPE de l’image d’entrée. On part de l’image résultant de l’algorithme de la 104 LPE. On référence les différents points selles entre deux régions connexes. Le graphe est construit à partir de 105 ces points, en établissant une connexion entre deux d’entre eux dès lors qu’ils appartiennent à un bassin 106 commun. 107
On réitère l’opération « Graphe + LPE » jusqu’à ce qu’on ait atteint le niveau hiérarchique satisfaisant. 108 De même que pour la modification d’homotopie, on préférera utiliser la profondeur des bassins plutôt que la 109 hauteur des points selles pour l’affectation de la hauteur du niveau des points du graphe. 110
En 2D, cette méthode est strictement équivalente à la modification d’homotopie, sauf qu’elle réduit de 111 façon très nette la complexité des cascades dès la deuxième itération. En effet, les points selles étant les seuls 112 points conservés, la taille de l’image d’entrée se trouve très nettement diminuée. 113
En 3D, cette méthode est plus exacte dans le sens où la largeur de la LPE n’est plus prise en compte. Le 114 seul critère permettant d’établir une connexité entre deux points selles est celui du voisinage d’une région par 115 rapport à une autre. La difficulté est alors de correctement détecter ce voisinage. D’autre part, puisque la 116 largeur de la LPE n’influe plus sur l’application de l’algorithme pour l’itération suivante, une région doit 117 forcément fusionner d’une itération à l’autre. 118
De ce fait, le nombre d’itérations nécessaires devient beaucoup plus faible que par modification 119 d’homotopie. 120
121
4 Méthode proposée
122
4.1 Méthode combinée cascades fusions 123
124 D’une itération à l’autre, l’algorithme des cascades par graphe fusionne trop de régions. C’est pourquoi il 125 serait judicieux, par un critère de nombre de régions, d’arrêter d’itérer, puis d’appliquer un algorithme de 126

fusions successives permettant d’obtenir le nombre voulu exact de régions significatives. 127
L’algorithme par Interactive Watershed Transform de H. Hahn et al. [8] crée une arborescence décrivant 128 de façon hiérarchique l’ordre selon lequel les points selles (ou points de fusions) doivent opérer une fusion 129 de bassins (figure 4). Cet algorithme fonctionne sur un critère de hauteur depuis les régions fournies par la 130 LPE de l’image d’entrée. 131
132
Figure 4 : Arbre de fusions.
133
134 Pour une segmentation plus performante, on va proposer un algorithme combinant les cascades et une 135 technique de fusions hiérarchiques sur un critère de profondeur des points selles. L’algorithme hybride va 136 tout d’abord effectuer les cascades jusqu’à n’obtenir qu’une seule région. 137
Ensuite il va créer un arbre référençant pour chaque niveau des cascades les points selles du graphe 138 correspondant, depuis les premiers points selles de la LPE de l’image d’entrée jusqu’au point selle réalisant 139 la fusion finale de l’image. Chaque point selle Si de courbure C est ainsi évalué au niveau de sa profondeur 140 P, avec : 141
ܲ൫ܵ
ூ
ሺܴ
, ܴ
ሻ൯ = ܥ൫ܵ
− ݉݅݊ሺܴ
, ܴ
ሻ൯ (1) 142
143 Ce critère définit la position du point selle dans la hiérarchie de son niveau de cascade (figure5). 144
145
Figure 5 : Indexation des points selles de l'image.
146
147
Sur la figure 5 une image a été segmentée par une LPE (9 régions) et les points selles ont été indexés (S5 148 à S12). La profondeur des points selles est calculée, on classe les points selles dans l'ordre croissant (S8, S10, 149 S6, S7, S12, S11, S9) puis on reconstruit l'image (figure 6). Les minima locaux sont représentés en gris rayé 150 (S6, S8 et S10). 151

Figure 6 : Première reconstruction de l'image
152
153
Les points selles sont à nouveau indexés. Dans le cas présent, une fois la LPE appliquée il reste S5, S9 et 154 S11. Ces trois points selles sont copiés, renommés (S2, S3, S4) et réévalués par rapport à leur nouvelle 155 profondeur et sont ainsi placés au niveau hiérarchique supérieur. L'itération suivante entraîne la fusion totale. 156
L'ensemble du processus des cascades peut être représenté sous forme d'un arbre où chaque noeud parent 157 correspond à l'opération de fusion des noeuds fils. En 3D, une région possède un nombre variable de points 158 selles. Dans la figure 7 est représenté l'arbre de segmentation correspondant à l'image de la figure 5. 159
Figure 7 : Arbre des cascades.
160 161
Une fois l'arbre construit, on sélectionne le niveau optimal de l'arbre par rapport au nombre de régions 162 souhaitées pour la segmentation du modèle. Le niveau retenu est celui qui possédera le nombre de régions le 163 plus proche tout en étant supérieur, afin que l'étape de fusion réduise ce nombre jusqu'à la segmentation 164 souhaitée. 165
Cette dernière étape consiste à hiérarchiser les points selles du niveau adéquat de l’arbre, et à appliquer 166 ces fusions jusqu’à obtenir le nombre de régions requises. La hiérarchisation est basée sur le critère des 167 profondeurs croissantes Ci des points selles de l’arbre. Pour chaque point selle traité, la fusion 168 correspondante est effectuée en affectant aux feuilles issues du point selle dans l’arbre un label commun. 169
Dans le cas de l'image 2D que nous traitons, le nombre de noeuds parents d'un point selle est limité à 2, 170 mais il faut savoir qu’en 3D ce nombre peut être supérieur. Il faut donc gérer le conflit d'affectation de labels 171 de 2 parents sur un même fils. Pour cela, on empêche à toute feuille labellisée d'être parcourue par la suite. 172 De ce fait la première fusion effectuée est prioritaire sur les suivantes (figure 8). 173
174
Figure 8 : Piles des priorités de fusions
175
176 La figure 9 résume les principales étapes de notre méthode de segmentation. 177
178
 6
7
6
7
1
/
7
100%