Formalisme à base de matrices de transfert pour - CFTL 2012

13ième Congrès Francophone de Techniques Laser, CFTL 2012 - ROUEN, 18 – 21 Septembre 2012
Formalisme à base de matrices de transfert pour la description
d’imagerie interférométrique en défaut de mise au point (ILIDS)
Huanhuan SHEN, Sébastien COETMELLEC, Gérard GREHAN et Marc BRUNEL
UMR CNRS 6614 CORIA, Avenue de l’Université, BP 12, 76801 Saint Etienne du Rouvray cedex
1 Introduction
L’information sur la taille des particules joue un rôle important dans la surveillance de processus
industriels, la modélisation de l’injection de la combustion, en météorologie, analyse médicale,
optimisation de processus en agriculture. Les techniques de diagnostic laser se sont beaucoup
développées, en particulier parce qu’elles peuvent être non intrusives: citons notamment
l’holographie, l’anémométrie phase Doppler, les Malvern, l’interférométrie d’arc en ciel, ou
l’imagerie interférométrique en défaut de mise au point (ILIDS : Interferometric Laser Imaging
Droplet Sizing).
L’ILIDS est appliquée à mesurer les tailles des gouttes transparentes dans un spray clairsemé à
travers une configuration relativement simple [1]. La configuration typique de l’ILIDS est rappelée à
la Fig1.
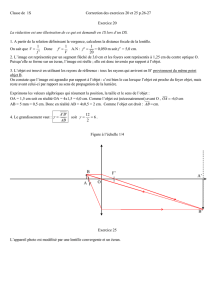
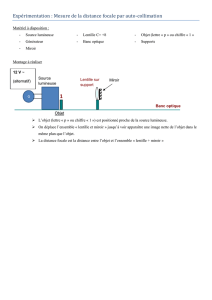
Fig1 : Configuration typique de l’ILIDS
Les faisceaux diffractés dans l’angle de diffusion
θ
sont collectés par une lentille sphérique.
L’angle de collection est noté
α
. Dans le plan image, deux « glare points » apparaissent tandis
que dans un plan en défaut de mise au point, les images des deux « glare points » se
chevauchent. Des franges d’interférence apparaissent dans la région superposée. En ILIDS, on
place le capteur CCD dans un plan en défaut de mise au point. L’information sur chaque particule
est confinée dans la tâche en défaut de mise au point [2], différenciée de l’holographie et du
Malvern. La taille de la tache est reliée à la position de la particule [3] et sa forme géométrique est
définie par l’ouverture du système optique. Une compression optique peut être réalisée afin
d’augmenter la concentration des particules mesurables [4]. La formule de l’ILIDS montrée
premièrement par Glantschnig et al. [5] dans l’approximation de l’optique géométrique se met sous
la forme de l’Equation(1).
1
1)2/cos(2
)2/sin(
)2/cos(
2
−
"
"
#
$
%
%
&
'
+−
+=Δ
θ
θ
θ
λ
π
θ
mm
m
(1)
Elle exprime l’interfrange en fonction des caractéristiques de la goutte.
m,
θ
Δ
sont l’espace
angulaire d’interfrange et l’indice de réfraction de la goutte. Le traitement d’image appliqué aux
images consiste à obtenir l’écart angulaire d’une interfrange, obtenu soit par le nombre de franges

[6], soit par la fréquence des franges [7] à partir des franges d’interférence. Les deux moyens ont
besoin d’une calibration et des difficultés existent : si l’on compte le nombre de franges, il est
difficile d’avoir l’angle de collection
α
, tandis que la fréquence des franges dépend des gouttes
mais aussi de différents coefficients liés à la géométrie du système de mesure [8]. Par ailleurs, la
plupart des configurations d’ILIDS utilisent un faisceau laser incident incliné par rapport à l’axe
optique et à son plan transverse, imposant une taille de la tache et un angle d’ouverture différents
selon les particules. Le problème sur la taille des taches peut être résolu avec une configuration de
Scheimpflug [6,7], mais l’autre reste non résolu. Si l’on souhaite généraliser l’utilisation
d’expériences ILIDS dans des configurations très variées, l’existence d’un simulateur général
capable de décrire tout système ILIDS devient nécessaire. Cet article présente l’élaboration d’un
simulateur d’expériences d’ILIDS très général, capable de donner accès aux relations théoriques
liant la géométrie du système, la nature des franges d’interférences, et les paramètres des gouttes.
2 Théorie du modèle
2.1 Théorie fondamentale
La théorie fondamentale de l’ILIDS est la propagation du champ électromagnétique à travers un
système optique complexe qui est décrite par l’intégrale de Huygens-Fresnel généralisée [9]. Les
éléments optiques changent la phase de l’onde et sont caractérisés par des éléments de matrices
Det,C,B,A
qui sont les éléments d’une matrice de transfert du système
tot
M
. En notant le plan
de l’entrée et le plan du capteur
),(et),y,x(
ηξ
respectivement, l’intégrale de Huygens-Fresnel
est donnée par l’Equation (2).
dxdyDyyA
B
i
DxxA
B
iyxG
BBi
Li
G
yy
y
xx
x
yx
!
"
#
$
%
&+−×
!
"
#
$
%
&+−=∫ℜ
)2(exp
)2(exp),(
)
2
exp(
),(
22
22
0
2
ηη
λ
π
ξξ
λ
π
λ
λ
π
ηξ
(2)
L
correspond au chemin optique suivant l’axe optique.
yxyxyx DBA ,,, ,,
sont les éléments de la
matrice
tot
M
suivant les axes transverses x ou y.
2.2 Description du champ incident
),(
0yxG
est le champ incident exprimé dans le plan des particules. Sa formule rigoureuse est
donnée par la théorie de Lorenz-Mie. Dans la configuration de l’ILIDS, le faisceau diffusé est
essentiellement du à l’existence de deux « points sources » : les deux « glare points » ; à savoir le
rayon réfléchi et le rayon réfracté [10]. Cette hypothèse permet de faire une simplification sur
),(
0yxG
. L’hypothèse est que le champ incident d’une particule se compose par deux points
sources ponctuels, comme l’indique l’Equation (3).
φ
δδ
i
eybxayaxayxG ),(),(),( 210 −+−=
(3)
Où
21,aa
sont les coefficients d’amplitude des deux « glare points » dépendant de l’angle de
diffusion.
φ
est le déphasage entre les deux « glare points ».

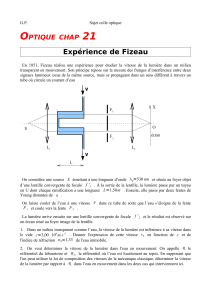
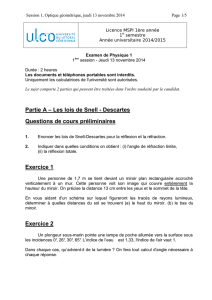
Fig2 : Deux « glare points » d’une goutte
Le schéma des deux glare points A et B pour une particule de diamètre
d
et d’indice m est montré
dans la Figure 2. Leurs positions relatives sont obtenues par optique géométrique :
)sin(
2
t
d
a=
,
)2/cos(
2
θ
d
b−=
. La relation entre les angles
t
et
θ
est
)2/sin()sin(
θ
−=tmt
. En conséquence
la distance entre les deux glare points est donnée par l’Equation (4) :
!
!
"
#
$
$
%
&
−+
+=−
)2/cos(21
)2/sin(
)2/cos(
22
θ
θ
θ
mm
m
d
ba
(4)
Le déphasage entre les 2 sources vaut
[ ]
πθθ
λ
π
φ
−−+−=)2/cos()cos(2)2/sin(2
2
2tamt
d
. A
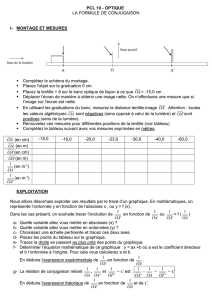
partir de cette relation, nous avons comparé la distance entre les deux « glare points » en fonction
de la taille de la goutte obtenue par l’Equation (4) (pour un angle de diffusion
°= 69
θ
) ou par
reconstruction d’un hologramme des « glare points » calculé rigoureusement en utilisant la théorie
de Lorenz-Mie. La comparaison est présentée à la Fig3. Les relations d’optique géométrique sont
une bonne approximation.
Fig3 : Comparaison entre la théorie de Lorenz-Mie et l’optique géométrique sur la distance entre
les deux glare points par rapport au diamètre de la goutte
2.3 Description des matrices de transfert
La matrice de transfert d’un système optique décrit la façon dont sont déviés des rayons à travers
un système (en respectant les lois de réflexion et réfraction). La liaison entre la matrice de transfert
et la propagation du champ donnée par l’Equation(2) est démontrée via le principe de Fermat : les
rayons formant l’image suivent un chemin optique quasi-identique [9]. La matrice totale de la
configuration ILIDS de la Fig1 se décompose en trois parties : la matrice entre les gouttes et la

lentille
1z
M
, la matrice pour la lentille de distance focale image f
lentille
M
, la matrice entre la lentille
et le capteur
2z
M
. Leurs expressions sont données dans l’Equation suivante :
!
!
"
#
$
$
%
&
=
!
!
"
#
$
$
%
&
−
=
!
!
"
#
$
$
%
&
=10
1
,
1
1
01
,
10
12
2
1
1
z
M
f
M
z
Mzlentillez
(5)
La matrice du système total est alors celle de l’Equation(6).
!
!
"
#
$
$
%
&
=××=DC
BA
MMMM zlentilleztot 12
(6)
Si le système optique est cylindrique, une séparation de l’expression de la matrice de transfert en
deux matrices distinctes selon les axes x et y est nécessaire.
2.4 Champ calculé sans l’ouverture
Comme le champ incident et la matrice de transfert totale sont connus, l’intégrale de l’Equation(2)
pour la configuration Fig1 se calcule. On obtient l’Equation(7).
( )
ee ii
y
y
yx aa
B
D
i
BBi
zzi
G)(
21
2
21
21
exp
)(
2
exp
),(
φθθ
η
λ
π
λ
λ
π
ηξ
+
+
'
'
(
)
*
*
+
,
-
.
/
0
1
2+
=
(7)
Où
)2(),2( 22
2
22
1
ξξ
λ
π
θξξ
λ
π
θ
xx
x
xx
xDbbA
B
DaaA
B+−=+−=
. L’intensité dans le plan du
capteur est alors
2
),(),(
ηξηξ
GI =
qui donne la formule de l’Equation (8) :
[ ]
)cos(2
1
),( 1221
2
2
2
1
2
φθθ
λ
ηξ
+−++= aaaa
BB
Iyx
(8)
2.5 Champ pris en compte de l’ouverture
En ILIDS l’ouverture du système est un paramètre essentiel. L’ouverture peut être prise en compte
afin de décrire l’extension finie des franges. L’ouverture se situe sur la lentille (Fig1), ce qui
découpe l’intégrale de Huygens-Fresnel généralisée en deux sections : la propagation entre les
gouttes et la lentille suivie de la traversée de la lentille caractérisée par la matrice
!
!
"
#
$
$
%
&
=×=
11
11
11 DC
BA
MMM zlentille
, et la propagation entre la lentille et le capteur, de matrice
!
!
"
#
$
$
%
&
==
22
22
22 DC
BA
MM z
. Le champ dans le plan de l’ouverture sera noté
)'y,'x(G1
, où
)'y,'x(
sont les coordonnées dans le plan de l’ouverture. Le champ
)'y,'x(G1
est donné par la relation (7)
si l’on remplace
),(
ηξ
par
)'y,'x(
ainsi que les coefficients de Mtot par ceux de la matrice M1.
L’ouverture est ensuite prise en compte sous la forme d’un coefficient de transmission
)'y,'x(T
.
L’expression de la propagation dans la deuxième section s’exprime alors par l’Equation(9).

'')'2'(exp
)'2'(exp)','()','(
)
2
exp(
),(
22
22
1
2
22
dydxDyyA
B
i
DxxA
B
iyxGyxT
BBi
zi
G
yy
y
xx
x
yx
!
"
#
$
%
&+−×
!
"
#
$
%
&+−=∫ℜ
ηη
λ
π
ξξ
λ
π
λ
λ
π
ηξ
(9)
La transmission
),( '' yxT
vaut un dans le cercle de rayon
0
R
et zéro dehors. Il s’écrit par la
décomposition en fonctions Gaussiennes ci-dessous :
∑
=
"
#
$
%
&
'+−=
N
k
k
kyx
R
Q
PyxT
1
22
2
0
)''(exp)','(
(10)
N est égale à 10. Les coefficients
kk QP ,
sont listés dans la ref [12]. Le champ dans le plan de
capteur devient alors l’Equation (11) et l’intensité est
2
2),(
ηξ
GI =
.
[ ]
eee kik
N
kyx
k
y
y
x
x
yxyx aa
kk
P
B
D
B
D
i
BBBBi
zzi
G)(
2
)(
1
1
2
2
2
2
2
2
2211
2
21
2
21
)()(
)(exp
)(
)(
2
exp
),(
βφβ
γγ
π
ηξ
λ
π
λ
λ
π
ηξ
+
(
)
*
+
,
-+
(
)
*
+
,
-+
=∑
=
(11)
yxxxx
y
y
y
y
k
y
x
x
x
x
k
x
yxx
x
yxx
x
BBB
b
BB
a
B
A
B
D
i
R
Q
k
B
A
B
D
i
R
Q
k
kkB
bA
ik
kkB
aA
ik
2211
2
1
12
1
1
11
2
),(
2
),(
2
)()(),()(
)(4)(4
)(,
)(4)(4
)(
212
2
1
2
2
02
2
0
2
2
2
2
2
1
2
2
1
2
1
2
1
1
λ
πη
φφ
ξ
λ
π
φ
ξ
λ
π
φ
λ
π
γ
λ
π
γ
γ
φ
γ
φ
λ
π
β
γ
φ
γ
φ
λ
π
β
ηηξξ
ηξηξ
==++=+=
+−=+−=
−−=−−=
Les termes
)(
2,1 k
β
contiennent la localisation des 2 centres correspondant séparément aux
positions des images des deux glare points pour l’intensité, ainsi que le terme d’oscillation en
cosinus le long l’axe
ξ
.
3.1 Comparaison avec la théorie de Lorenz- Mie
Une simulation d’images ILIDS avec une seule lentille sphérique a été proposée par Girasole et al.
Les faisceaux diffusés par la particule jusqu’à la lentille étaient calculés par la théorie de Lorenz-
Mie généralisée et la propagation des faisceaux de la lentille au capteur étaient calculés par
l’intégrale de Huygens-Fresnel [11]. Nous allons comparer ici ces simulations à celles que l’on peut
réaliser avec notre modèle. Nous utilisons les mêmes paramètres :
mz 72.0
1=
,
mf 6.0=
,
nm488=
λ
,
°= 5.66
θ
, le diamètre de la lentille
mms 100=
, l’indice de goutte d’eau
33.1=m
, le
diamètre de la goutte d’eau
µmd60=
. Le plan image est alors à
m6.3
derrière la lentille. Quatre
profils d’images en défaut de mise au point à quatre distances
2
z
sont montrées dans la Fig4.
Pour chacune d’elles, nous trouvons le même nombre des franges (16) et le même interfrange que
Girasole et al. qui utilisaient la théorie de Lorenz-Mie.
 6
7
8
6
7
8
1
/
8
100%