Inversion de données pour l`imagerie spectrale sur

Inversion de données pour l’imagerie spectrale
sur-résolue en astronomie
François ORIEUX 1, Thomas RODET 1, Jean-François GIOVANNELLI 1et Alain ABERGEL 2
1Laboratoire des Signaux et Systèmes (CNRS – Supélec – UPS)
Supélec, Plateau de Moulon, 91192 Gif–sur–Yvette Cedex, France
2Institut d’Astrophysique Spatiale (CNRS –UPS)
Université Paris-Sud, Bât. 121, 91405 Orsay, France
OF
R)
C
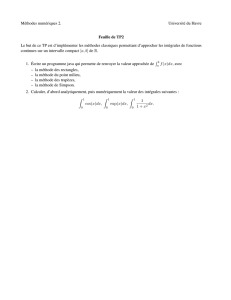
Ciel Convolution par
l’ouverture OTroncature
par la fente FDiffraction par
le réseau RIntégration par
le capteur CSortie modèle
Résumé
Nous nous intéressons à l’inversion de données infrarouges issues
du spectromètre IRS du satellite SPITZER [1]. Les obstacles rencon-
trés sont la complexité de l’instrument et un phénomène de sous-
échantillonnage. Tout d’abord, un modèle instrument réaliste, conti-
nue et explicite est obtenu avec des approximations gaussiennes
pour les réponses, mais surtout avec une décomposition originale
du ciel sur des gaussiennes également. Ensuite, à l’aide de ce mo-
dèle et de la redondance des données, nous avons développé une
nouvelle méthode d’estimation d’un ciel sur-résolu. Cette méthode
repose sur l’inversion des données par minimisation d’un critère qua-
dratique réalisée par un algorithme de descente. Les premiers résul-
tats mettent en évidence un gain significatif en résolution ( ).
1 Modèle instrument
Reproduction des mesures à partir d’un flux :
1.Convolution par l’ouverture
2.Troncature par la fente
3.Diffraction par le réseau
4.Intégration capteur.
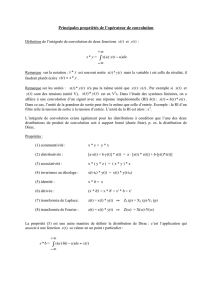
1.1 Convolution par l’ouverture
•Diffraction par l’ouverture [2]
•Convolution 2D ( )
"p
p#
•Dépend de
0
0.01
0.02
0.03
0.04
0.05
I
•Approximation par une gaussienne
!
•Sur le plan focal (2 intégrales)
ZZ d d
1.2 Troncature par la fente
•Troncature de
•« Supprime » (laisse sa place à )
1.3 Diffraction par le réseau
•Angle de sortie dépend de et [3]
•Seul premier mode observé
où
•Approximation par une gaussienne
•A la sortie du réseau (+ 2 intégrales)
Z Z d d
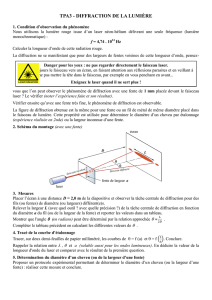
1.4 Intégration capteur
•Distortion du flux décalage
•Données du capteur (+ 2 intégrales)
•Repliement
0.1
0.2
0.3
0.4
0.5
0.6
0.7
I
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
I
•Balayage fente (sub-pixelique) : redondance des données
2 Décomposition du ciel
•Décomposition sur des gaussiennes () et Dirac ( ) [4] [5] [6]
XXX
•approximation gaussiennes 5des 6 intégrales explicitées
•Modèle continue
•Réaliste et rapide
•Linéaire :
3 Inversion
•Problème inverse mal posé
•Pénalisation quadratique des différences [7]
•Estimateur : argmin
•Optimisation : descente de gradient
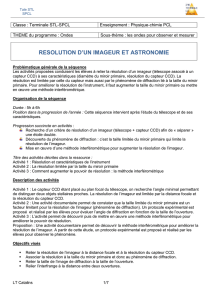
4 Résultats
•Dimensions spatiales :
–Méthode classique (co-addition des données)
0
20
40
60
80
100
–Notre méthode ( , )
0
20
40
60
80
100
•Dimension spectrale :
–Méthode classique
20 40 60 80 100 120
0
50
100
–Notre méthode
20 40 60 80 100 120
0
50
100
•Plus de structure
•Intégration capteur dans le modèle continue
•Résolution potentiellement plus importante que celle des données
Références
[1] J. R. Houck et al., «The infrared spectrograph (IRS) on the Spitzer space teles-
cope», ApJS, vol. 154, pp. 18–24, septembre 2004.
[2] J. W. Goodman, Introduction à l’optique de Fourier et à l’holographie, Masson,
Paris, 1972.
[3] J.-P. Pérez, Optique, fondements et applications, Dunod, 2004.
[4] R. M. Lewitt et R. H. T. Bates, «Image reconstruction from projections : IV : Pro-
jection completion methods (computational examples)», Optik, vol. 50, pp. 269–
278, 1978.
[5] G. Rochefort, F. Champagnat, G. Le Besnerais et J.-F. Giovannelli, «An impro-
ved observation model for super-resolution under affine motion», IEEE Trans.
Image Processing, vol. 15, n˚11, pp. 3325–3337, novembre 2006.
[6] A. Andreyev, M. Defrise et C. Vanhove, «Pinhole SPECT reconstruction
using blobs and resolution recovery», IEEE Trans. Nuclear Sciences, vol. 53,
pp. 2719–2728, octobre 2006.
[7] J. Idier, Ed., Approche bayésienne pour les problèmes inverses, Traité IC2,
Série traitement du signal et de l’image, Hermès, Paris, 2001.
1
/
1
100%