Évaluation des contraintes articulaires au niveau de la hanche au

Ann. Kinésithér., 1988, t. 15, n° 6, pp. 277-283
©Masson, Paris, 1988 MÉMOIRE
Évaluation des contraintes articulaires au niveau de la hanche
au cours d'un exercice contre résistance en pouliethérapie.
P. WILLEMS, L. PLAGHKI, J.L. THONNARD, J. DE NAYER
Université Catholique de Louvain, Unité de Réadaptation (Prof J. de Nayer), av. Mounier, 53, 1200 Bruxelles, Belgique.
La pouliethérapie est indIquée notamment
pour le renforcement de la musculature de
membres dont la fragilité osseuse ou arti-
culaire ne permet pas l'application de grandes
forces. Willems et Coll. (12) ont cependant
montré que dans le circuit résistant pour la
tonification des muscles abducteurs de hanche,
la force résistante pouvait varier de zéro à plus
de trois fois la charge suspendue au circuit.
Le but du présent travail est d'évaluer les
contraintes articulaires au niveau de la hanche
au cours d'un tel exercice thérapeutique. Les
auteurs montrent que, si aucune consigne de
vitesse d'exécution du mouvement n'est donnée
au patient, ces contraintes peuvent dépasser
celles de la station unipodale.
Introduction
Selon Rocher (11), la pouliethérapie
comprend tous les procédés de mobilisation
active ou passive qui combinent l'utilisation de
systèmes «poids-poulies » avec la suspension
de membre àmobiliser. Dans ce cas, le membre
est soutenu par une ou plusieurs élingues de
suspension et le mouvement est exécuté dans un
plan horizontal. On dit alors que le membre
est en « apesanteur» puisqu'aucune force mus-
culaire n'est nécessaire pour le maintenir dans
ce plan. Cette technique est principalement
Tirés à part: P. WILLEMS, unité READ - DCL 5375, av.
Mounier, 53, B-1200 Bruxelles, Belgique.
indiquée pour entretenir la mobilité articulaire
et renforcer la musculature de membres dont
la fragilité ne permet pas _l';:tpplication de
grandes forces (5).
Le circuit résistant pour muscles abducteurs
de hanche est très fréquemment utilisé en
traumatologie et chirurgie orthopédique (ostéo-
tomie, arthroplastie, etc ...), avant même que la
mise en charge sur le membre soit autorisée.
Selon la tradition clinique, ce type de circuit ne
présente aucun danger pour les membres fragi-
lisés (2, 5, 11). Les raisons invoquées sont les
suivantes :
1) les contraintes articulaires liées au poids
du corps sont supprimées puisque le sujet est
en décubitus dorsal;
2) le membre étant soutenu au niveau du
genou et de la cheville, les contraintes liées à
la pesanteur sont négligeables;
3) les contraintes en compression liées à la
suspension sont faibles;
4) les contraintes imposées au membre et aux
diverses articulations par le circuit résistant sont
peu importantes étant donné que les charges ne
dépassent habituellement pas 4 kg.
Cependant, nous avons montré (12) que da~s
les conditions habituelles, la force résistante (R)
engendrée par le système de poids et de poulies
pouvait facilement varier de 0 à près de trois
fois la charge suspendue. De plus, la plupart des
thérapeutes ne tiennent pas compte des forces
engendrées par l'activité musculaire (Frl;), dans
l'évaluation de la grandeur des contraintes
articulaires. On peut dès lors se demander si l~
variations importantes de la force résistante R
. ----+
et de la force musculaire Fm n'engendrent pas
r
,~

278 Ann. Kin ésith ér.,1988, t. 15, n° 6
des contraintes articulaires qui pourraient
constituer un danger potentiel pour des membres
fragilisés, principalement lorsque l'appui est
contre-indiqué. Pour répondre àcette question,
nous avons évalué la grandeur des forces de
compression articulaire au niveau de la hanche
au cours d'un mouvement contre résistance et
nous les avons comparées aux forces rencontrées
lors de la station bipodale et unipodale.
Méthodes
DESCRIPTION D'UN CIRCUIT POUR MUSCLES
ABDUCATEURS DE HANCHE
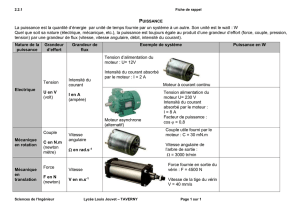
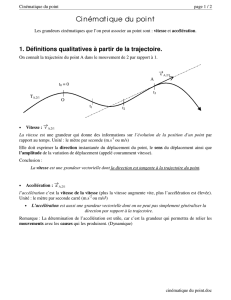
Le patient est installé en décubitus dorsal dans une cage
grillagée (dite «cage de Rocher») dont les parois servent
de surface d'ancrage aux poulies et aux élingues de
suspension. Le membre est soutenu par deux élingues
fixées au plafond de la cage de Rocher à l'aplomb de
l'articulation à mobiliser (fig. 1 - point A). Elles
soutiennent le membre, l'une au niveau du genou et l'autre
au niveau du pied (fig. 1 - points B et C). Le membre
se déplace dans un plan horizontal. Il est soustrait à
l'action de la pesanteur. Le filin du circuit résistant est
habituellement placé à l'extrémité distale du membre à
mobiliser à la face interne du pied (fig. 1 - point T). La
première poulie (fig. 1 - point D) est fixée à la cage dans
le plan du mouvement de manière à ce que le filin soit
FIG. 1. - Circuit résistant pour la tonification des muscles
abducateurs de hanche.
perpendiculaire au membre lorsque celui-ci est à 0 degré
d'abduction. Une seconde poulie (fig. 1 - point E) est
attachée au plafond de la cage ..
MODÉLISATION ET BILAN DES FORCES
EXTÉRIEURES AU SYSTÈME
Le calcul des contraintes imposées au membre inférieur
lors d'un mouvement d'abduction de hanche contre
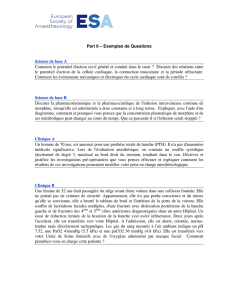
résistance a été réalisé à partir du modèle présenté à la
figure 2.
Le membre inférieur est divisé en 8 segments; 7 cônes
tronqués homogènes et un coin pour le pied (8). Les
données anthropométriques telles que la densité, la
distance entre le centre de rotation et le centre de gravité,
etc ... proviennent de Winter (15). Le moment d'inertie
de chacun des cônes est calculé suivant un procédé décrit
par Hanavan (7). Le centre de rotation de la hanche est
situé en un point (fig. 2 - point 0) considéré comme fixe,
au centre de la surface délimitant l'extrémité proximale
du membre inférieur. Cette surface est située dans un plan
passant par le bord supérieur du grand trochanter. Les
forces extérieures au système agissant sur le membre sont
au nombre de six.
-'>
A. La force résistante R
->
La force résistante R est la force engendrée par le
système de poids et de poulies. Elles est appliquée au
niveau du point de fixation du filin sur la bottine, à la
face interne du pied (fig. 2 - point T). La plupart des
auteurs (IJ, 5, 6, 9, Il) ont toujours postulé que la force
résistante R est égale à la charge et qu'elle reste constante
au cours du mouvement. Willems et coll. (12) ont montré
que la grandeur de Rvarie de façon importante au cours
du mouvement et que ces variations sont liées aux forces
de frottement dans les poulies et à la force d'inertie que
la charge oppose à l'accélération du mouvement.

~
B. Le poids du membre (Pm)
D. La force des muscles abducteurs de hanche
~
(Fm)
C. Les forces liées à la suspension du membre
---+ ----+
(Fg et Fj)
Le poids du membre est représenté à la figure 2 par
le vecteur Pri;:. Il est appliqué au niveau du centre de
gravité du membre (fig. 2 - point 0').
----+
E. Les forces de réaction articu~aire (Fc)
2) l'insertion distale du muscle est située sur la surface
délimitant l'extrémité proximale du membre, 4,5 cm en
dehors du centre de rotation (fig. 2 - point B),
3) lorsque le membre est à adegré d'abduction, le
muscle forme un angle de 159° avec l'axe du membre.
Sa longueur est alors de 15,5 cm.
La grandeur de la force engendrée par le «muscle
équivalent» est calculée à partir de l'équation
1.a - Lr .R
Fm =-----bm
où - 1 : est le moment d'inertie du membre par rapport
àl'axe de rotation;
- a : est l'accélération angulaire du membre;
- Lr: est le bras de levier effectif de la force résistante.
- bm : est le bras de levier effectif de la force
musculaire de fu.
Les forces appliquées sur le membre vont engendrer
des forces de réaction articulaire, réparties sur la surface
de la tête fémorale. La résultante des forces de réaction
est représentée à la figure 2 par le vecteur &.Ce vecteur
est appliqué au niveau du centre de rotation de la hanche
(fig. 2 - Point 0). Il est déterminé à partir des autres forces
par l'équation :
----+ -; --+ ----+ ----+ -t ----+
Fc =m.a-R-Pm-Fg-FJ-Fm
Ann. Kin ésithér.,1988, t. 15, n° 6 279
(1)
(2)
de la
Fj =(1-rj). mj. glsin Sj
Fg =[(1-rc). mc +rj. mj]. glsin Sc
où - mj et mc: sont les masses de la jambe et
pg et Fj sont les forces apparaissant dans les élingues
suite à la suspension du membre. Elles sont dirigées dans
l'axe des élingues. La grandeur de ces forces est évaluée
à partir des équations suivantes :
cUisse ;
rj et rc : sont les rapports entre la distance <
extrémité proximale du segment -
centre de gravité >et la longueur
totale du segment;
- Sj et Sc : sont les angles entre les élingues et l'axe
du membre;
- g : est égal à 9,81 mis 2.
Selon Fick (cité par Pauwels) (10), les muscles
produisant une force en abduction peuvent être divisés
en deux groupes : - 1 - les muscles pelvi-trochantériens,
c-à-d. le muscle Moyen Fessier, le muscle Petit Fessier
et le muscle Pyramidal, et - 2 -les muscles pel vi-cruraux,
c-à-d. le Tenseur du Fascia Lata, le muscle Droit
Antérieur et le muscle Couturier.
Il est actuellement impossible de mesurer directement
la grandeur de la force développée par chacun de ces
muscles, à moins d'utiliser des techniques invasives. D'un
point de vue expérimental, nous pouvons uniquement
mesurer la grandeur de la résultante des moments
musculaires (13). Il est dès lors impossible d'évaluer la
participation relative de chacun de ces muscles à partir
de ce moment résultant, puisque le système est indéter-
miné. On doit donc se résoudre à réduire le groupe des
muscles abducteurs. de hanche à un seul muscle appelé
« muscle abducteur équivalent», dont l'activité est
représentative de l'ensemble (3). La force engendrée par
le muscle équivalent est représentée à la figure 2 par le
----+
vecteur Fm.
En nous basant sur les travaux de Fick (dans Pauwels)
(10) et ceux de Dostal (4), nous avons déterminé les
caractéristiques du muscle abducteur « équivalent»
comme suit :
1) le muscle équivalent est situé dans le plan frontal
passant par le centre de rotation de la hanche,
où - m : est la masse du membre ;
- a: est l'accélération du centre de gravité du membre.
PROCÉDÉS DE CALCUL
Les programmes de calcul ont été réalisés sur un
DAI-PC. Nous avons calculé les forces de réaction
articulaire au niveau de la hanche au cours de mouve-
ments résistés par des charges de 2 et 4 kg. Les données
nécessaires aux calculs sont :
1) les dimensions anthropométriques du membre
inférieur,
2) la grandeur des variables mécaniques du mouvement
contre résistance à un instant donné du mouvement,
c-à-d. :
- le déplacement angulaire (8),
- la vitesse angulaire (w),
- l'accélération angulaire (a),
- la force résistante (R),
3) la distance entre la première poulie et le membre
à 0° d'abduction,
4) la distance entre le point 0 et le plafond de la cage.
Ces données ont été déterminées à partir de mesures
expérimentales réalisées au cours de deux études précé-
dentes (12, 13).

280 Ann. Kinésithér., 1988, t. 15, n° 6
Résultats
ÉVOLUTION DES CONTRAINTES
ARTICULAIRES AU COURS DU MOUVEMENT
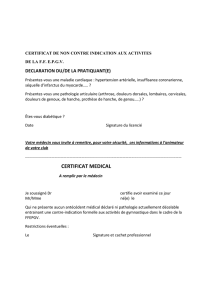
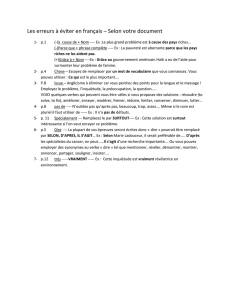
La figure 3 représente l'évolution temporelle
des variables cinématiques (8, co, a) et de la
-+
grandeur de la force résistante R au cours d'un
mouvement d'abduction de hanche. La charge
suspendue au circuit est de 2 kg. Aucune
consigne de vitesse n'est donnée au sujet.
Le mouvement est exécuté en 1,20 seconde.
R
a
20
N
o
Le sujet maintient ensuite le membre à 47°
d'abduction (soit 0,827 rad). La vitesse angulaire
maximale de 780/s (soit 1,37 radis) est atteinte
après 0,7 seconde. L'accélération angulaire (a)
atteint un maximum de 197°/s2 (soit 3,45 rad/s2)
après 0,44 seconde. La décélération maximale
de 247°/s2 (soit 4,31 rad/s2) est obtenue après
0,96 seconde.
Le tracé du haut représente la grandeur de
la force résistante R. La ligne en traits dis-
continus représente la charge de 2 kg. On
observe que R n'est pas égale àcette charge et
qu'elle varie de manière importante au cours du
mouvement. Durant la phase d'accélération du
membre, R atteint un maximum de 37,2 N (soit
190 %de la charge), et un minimum de 13,8 N
(soit 70 %de la charge) durant la phase de
décélération. Ces variations de la force résistante
sont liées à la force d'inertie engendrée par la
charge et aux forces de frottement dynamique
(12).
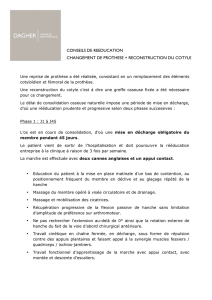
La figure 4 représente l'évolution temporelle
de la grandeur de la force de compression
articulaire au niveau de la hanche (Fe) au cours
de ce mouvement. Dans l'exemple décrit, la
longueur du membre inférieur est de 88,6 cm,
sa masse est de 12 kg et son moment d'inertie
autour de l'axe vertical est de 2,037 kg.m2•
•
e
osec. l
[ ~nd ",-'
.5
rad
o
Fe (N)
1200
800
400
Fe/PC
2
1.5
1
0.5
FIG. 3. - Évolution temporelle du déplacement angulaire (8),
de la vitesse angulaire (w), de l'accélération angulaire (a) et de
la grandeur de la force résistante (R) au cours d'un mouvement
d'abduction de hanche dans un circuit résistant en pouliethérapie.
La charge suspendue au circuit est de 2kg.
0--1 1
111
LO
0.2.4.6.8
1.0
1.2
t(sec)
FIG. 4. - Évolution de la grandeur de la force de réaction
articulaire (Fc) au cours du mOUi'emi?1l, d~ri! à la Fig. 3. Fc
est exprimé en N et par roppon ait poiIi_, du corps (PC).
1-

1
j----+
La force de compression Fe dépend princi-
.~
paIement de la force musculaIre Fm. En effet,
----+ .
la grandeur de Fm est de l'ordre de 20 fOIS
supérieure àla grandeur des forces engendrées
par le circuit résistant et par la force d'inertie
du membre (équation 4). Ceci est lié au fait que
le bras de levier de ~ est beaucoup plus petit
que le bras de levier des autres forces. Puisque
----+
la grandeur de la force musculaire Fm varie en
fonction de l'accélération angulaire et de R -
qui dépend lui-même de a - (équation 3), la
----+
grandeur de la force de réaction articulaire Fc
variera également en phase avec a. Ceci est
illustré àla figure 4. Avant le départ du
mouvement, Fe est de 374 N. Cette force atteint
un maximum de 916 N soit plus de 1,5 fois le
poids du corps lorsque l'accélération du membre
est maximale. Fc décroît ensuite et atteint un
minimum de 60 N lors de la phase de
décélération du mouvement. Lorsque le membre
est maintenu en abduction maximale, Fc est
égale à314 N, soit environ 0,6 fois le poids du
corps.
Ann. Kin ésithér., 1988, t. 15, nO 6 281
INFLUENCE DE LA CHARGE
ET DE L'ACCÉLÉRATION MAXIMALE
DU MOUVEMENT
Les charges habituellement utilisées en clini-
que sont comprises entre 1 et 4 kg. Pour ce type
de charge, lorsqu'aucune consigne de vitesse
n'est donnée au patient, le mouvement est
exécuté dans des temps allant de 0,8 à1,6 se-
conde. Dans ce cas, l'accélération angulaire
maximale varie de 1,5à 7 rad/s2 (14). Lafigure 5
représente la grandeur des forces de compression
au niveau de la hanche en fonction de l'accéléra-
tion angulaire maximale du mouvement. Les
points représentent les valeurs de Fc calculées
chez un même sujet, àpartir des valeurs
expérimentales de e, (ù, aet de R pour des
charges de 2 kg (.) et de 4 kg' (c::J).
Fc varie de 650 N à près de 1300 N pour
une charge de 2 kg, et de 1200 N à1750 N
environ pour une charge de 4 kg. Ces contraintes
sont plus importantes avec une charge de 2 kg
et une grande accélération qu'avec une charge
de 4 kg et une accélération faible.
FIG. 5. - Relation entre la grandeur de la force de réaction
articulaire (Fc) maximale et l'accélération angulaire maximale.
Fc est exprimée en N et par rapport au poids du corps (PC).
Force de Compression
Fe (N) -Hanehe- Fe/PC
1800
234 5 6 7
Acc. Ang. - rad.see-z
1300
800 ••CJ4 Kg
.2 Kg
3
2.5
2
1.5
INFLUENCE DE LA LONGUEUR DU BRAS
DE LEVIER MUSCULAIRE
Lorsque le bras de levier musculaire (bm) est
modifié, comme cela peut survenir par exemple
dans certaines dysplasies, ou après une ostéoto-
mie de la hanche, l'intensité de la force de
compression articulaire va être modifiée.
Si bm augmente de 1 cm, la valeur maximale
de la force de compression articulaire Fc au
cours du mouvement décroît de 20 %environ
(de 935 à793 N); et si bm diminue de 1 cm,
Fc augmente d'environ la même valeur (de 935
à1165 N). ----+
La grandeur de la force Fc dépend principa-
lement de la force musculaire Fm. La grandeur
----+
de Fm peut être évaluée par le rapport du
moment musculaire et du bras de levier bm
(équation 3).
En première approximation, on peut donc
affirmer que, pour un moment musculaire
donné, la force musculaire et la force de
compression sont inversement proportionnelles
àla grandeur du bras de levier bm.
 6
7
6
7
1
/
7
100%