Etude en radiofréquences de transistors à effet de champ MOS

EVALUATION DU BRUIT DANS LES MOSFET SOI
127
Chapitre III : Evaluation du bruit dans
les MOSFET SOI
À la suite du précédent chapitre qui traite des aspects caractérisations en petit signal
micro-ondes des MOSFET SOI partiellement désertés, ce chapitre analyse les aspects bruit
électronique dans ces dispositifs.
La première partie de ce chapitre traite de l'extraction et de la modélisation des sources de
bruit micro-onde dans les MOSFET SOI partiellement désertés. Ainsi, à partir des différents
modèles qui permettent d'expliquer le comportement en bruit des transistors à partir de
l'estimation des sources de bruit globales, cette partie définie les quatre paramètres de bruit,
couramment employés pour caractériser le niveau de bruit des dispositifs actifs et ainsi révéler
leurs performances. Le bruit électronique dans les micro-ondes nécessite l'emploie d'une
technique et d'appareils spécifiques afin de mesurer et d'analyser des signaux de très faible
puissance, proche de -100 dBm. Cette partie se poursuit donc sur la description de la
méthodologie employée pour la mesure des niveaux de bruit dans les MOSFET SOI
partiellement désertés. Ainsi, les moyens mis à disposition au niveau du banc de mesure de bruit
sont évoqués. Pour finir, les méthodologies utilisées afin d'estimer les niveaux de bruit globaux
dans les MOSFET SOI partiellement désertés, à partir des résultats de la mesure, sont définies à
la fin de cette partie.
La seconde partie de ce chapitre traite des sources de bruit électronique intrinsèques aux
MOSFET SOI partiellement désertés. Par conséquent, les outils mathématiques ainsi que les
différentes sources de bruit sont définis. Les techniques d'analyse du bruit électronique dans les
dispositifs actifs sont ensuite exposées. À l'aide d'un modèle comportemental, ces méthodes
permettent d'estimer les niveaux des différentes sources de bruit intrinsèques, en prenant en
considération les éléments comportementaux, autres que le bruit, qui ont été exposés dans le
chapitre précédent. Cette partie se termine par l'étude du comportement en bruit des MOSFET
SOI partiellement désertés, en fonction de leurs paramètres intrinsèques, de la fréquence
d'utilisation et de la polarisation statique appliquée aux bornes de ces dispositifs.
1- Le bruit électronique
La mesure analogique des dispositifs actifs s'effectue sous l'hypothèse que les niveaux de
bruit électronique sont négligeables devant le niveau de puissance du signal envoyé. Cependant
tous les systèmes électroniques reçoivent et apportent du bruit électronique au signal utile. Il est
alors intéressant de quantifier et de modéliser ces sources de bruit afin d'améliorer les
performances des dispositifs notamment lorsque ceux-ci travaillent à des niveaux de puissance
faibles. L'étude du bruit est donc une discipline qui permet de mieux appréhender le
fonctionnement des dispositifs notamment leurs comportements (par ex : en fréquence) ainsi que
leurs qualités (par ex : amplificateurs faible bruit). Cette partie traite des sources de bruit et des
techniques de caractérisation du bruit électronique dans les micro-ondes. Des éléments de
traitement du signal aléatoire sont donnés à l'annexe I.

CHAPITRE III
128
1.1 Modélisation des sources de bruit
1.1.1 Circuit équivalent
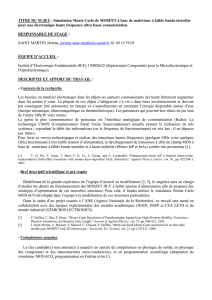
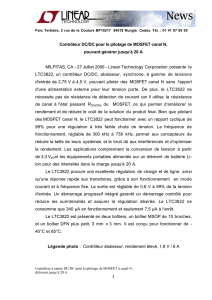
Les sources de bruit dans un dispositif1 sont représentées sous forme de générateur de
tension ou de courant, respectivement en série ou en parallèle avec l'élément bruyant[1,2], voir
l'illustration de deux sources de bruit équivalentes à la figure 1. En utilisant la relation entre les
théorèmes de Thévenin et de Norton pour les sources d'alimentation[3], il est possible d'utiliser
aisément l'une ou l'autre des représentations.
Figure 1 : Représentation des sources de bruit basée sur le
théorème de Thévenin ou de Norton.
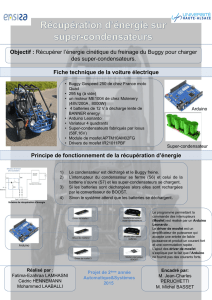
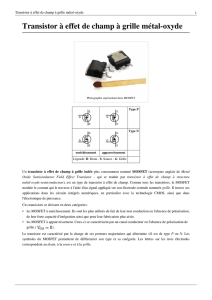
Si deux sources de bruit sont en série et non corrélées, comme il est illustré à la figure 2, la source
de bruit totale 2
n
e sera 2
n
e=2
1
e+2
2
e.
Par exemple :
2
1
e=4kBT1R1∆f
2
2
e=4kBT2R2∆f
donne :
()
211 2 2
4
nB
ekfTRTR=∆ + (1)
Les deux mêmes sources de bruit précédentes mises en parallèle, voir figure 2, donneront une
source de bruit en tension totale s'exprimant ainsi :
()
()
212
21 12 2
12
4
nB RR
ekfTRTR
RR
=∆ +
+ (2)
Figure 2 : Sources de bruit en tension en série et en parallèle.
Pour des sources de bruit en courant, des résultats identiques sont obtenus en remplaçant R par
G. Lorsque deux sources de bruit en courant sont mises en parallèle, l'expression de la source de
bruit en courant totale 2
n
isera identique à l'équation (1). Pour des sources de bruit en courant
mises en série, l'expression de 2
n
isera similaire à l'équation (2).
1 La source de bruit de grenaille est placée en générale en parallèle avec la jonction qui lui donne naissance.
G
2
i
R
2
e
2
2
e
R
1
2
1
e
R
2
R
1
2
1
e
R
2
2
2
e

EVALUATION DU BRUIT DANS LES MOSFET SOI
129
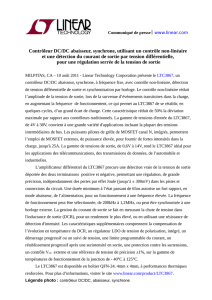
1.1.2 Les sources de bruit globales
Pour simplifier l'étude du bruit dans les quadripôles, les sources de bruit internes au
dispositif sont ramenées à l'extérieur de celui-ci. Alors, uniquement deux sources de bruit
équivalentes caractérisent en bruit l'ensemble du quadripôle[4,5]. Ces dernières sont mises en
cascade avec le dispositif non bruité. En appliquant les théorèmes de Thévenin et de Norton,
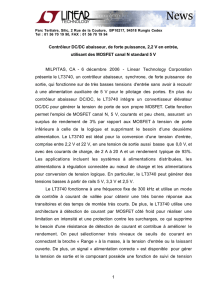
plusieurs configurations de circuit équivalent sont possibles[5,6]. Quatre configurations sont
illustrées à la figure 3.
Figure 3 : Représentations équivalentes du bruit dans un
quadripôle. Le dispositif est considéré non bruité et les sources de
bruit sont ramenées en entrée ou en sortie du quadripôle.
La représentation de la figure 3-a est habituellement employée pour déterminer les sources de
bruit des transistors à effet de champ. Ce modèle est directement relié aux paramètres Y du
dispositif. En se basant sur l'étude menée par A. Van Der Ziel[2,7], ce modèle peut être
directement utilisé pour l'analyse du bruit thermique dans les MOSFET SOI partiellement
désertés. Le modèle de la figure 3-c est utilisé afin de relier les quatre paramètres de bruit définis
plus loin dans cette section aux sources de bruit intrinsèques des dispositifs à étudier, comme les
MOSFET SOI partiellement désertés. Les sources de bruit illustrées à la figure 3-a, à la figure 3-b
et à la figure 3-c sont corrélées réciproquement. Le coefficient de corrélation est défini à
l'annexe I. Concernant la figure 3-c, ce coefficient de corrélation s'écrit :
⋅
=
⋅
*
22
ie
c
ie
(3)
Le symbole * dans l'expression e* correspond à la valeur complexe conjuguée de e. À la figure 3-d,
pour des simplifications mathématiques, le coefficient de corrélation est remplacé par des
admittances de corrélation non bruitées dont leur température intrinsèque est de 0 °K. En fait, la
source de bruit en courant 2
ipeut être divisée en une partie corrélée à la source de bruit en
tension 2
eet une autre partie non corrélée[5]. Ceci s'exprimant par :
i=in+e·Ycor ou 2
i=(in+e·Ycor)( in+e·Ycor)* avec Ycor=gcor+jbcor.
L'admittance de corrélation est définie en fonction de c selon :
2*
22
cor
iie
Yc
ee
==
(4)
Y11 Y12
Y21 Y22
i1 i2
v2
v1 2
1
i
2
2
i
c
Z11 Z12
Z21 Z22
i1i2
v2
v1
2
1
e2
2
e
c
a) b)
c) d)
i1 i2
v2
v1
2
i
c
2
e
Matrice
ABCD
2
e
i1i2
v2
v12
n
i
Matrice
ABCD
Y
cor
-Ycor

CHAPITRE III
130
À partir des quatre modèles présentés à la figure 3, il est possible de passer d'un modèle à un
autre par simple transformation. Par exemple, en remplaçant les deux sources de courant de la
figure 3-a par une source de tension et une source de courant, comme il est indiqué à la
figure 3-c, et en s'aidant des paramètres Y du quadripôle, la transformation s'effectue ainsi[5] :
2
222
21
i
eY
= (5-a)
2
22 2
11 *
11
12 12
221
21
2
nYY
ii i ii
Y
Y
⎛⎞
=+ −ℜ
⎜⎟
⎝⎠
(5-b)
2*
2
*12
11 2*
21
21
niii
ie Y Y
Y
=−
(5-c)
*
12
11 21 2
2
cor ii
YYY
i
=− (5-d)
Inversement, les sources de bruit 2
1
iet 2
2
ipeuvent être définies à partir de 2
eet 2
iselon :
()
()
2222
11111
2
nn cor
iieY YY=+ −ℜ (6-a)
222
221n
iYe= (6-b)
*
12
22
12
ii
cii
= (6-c)
Une autre technique basée sur les matrices de corrélation[8] a été développée par H. Hillbrand et
P. Russer. Un exemple de matrice de corrélation est indiqué ci-dessous.
()
**
11 12
12 **
21 22
1
,2
x
xxx
Cxx f
x
xxx
⎡
⎤
⎢
⎥
=∆
⎢
⎥
⎣
⎦
(7)
À partir des modèles de sources de bruit proposés à la figure 3, il est possible de définir une
matrice de corrélation pour chaque représentation, dépendante des paramètres Y, Z ou ABCD du
quadripôle. Ces matrices, données au tableau suivant, contiennent toutes les combinaisons de
corrélation entre deux sources de bruit.
Circuit
équivalent
de bruit
cf. figure 3 – a)
cf. figure 3 – b)
cf. figure 3 – c)
Matrice de
corrélation
**
11 12
**
21 22
1
2
Y
ii ii
Cfii ii
⎛⎞
⎜⎟
=⎜⎟
∆⎝⎠
**
11 12
**
21 22
1
2
Z
ee ee
Cfee ee
⎛⎞
⎜⎟
=⎜⎟
∆⎝⎠
**
**
1
2
A
ee ei
Cfie ii
⎛⎞
⎜⎟
=⎜⎟
∆⎝⎠
Cas d'un
quadripôle
passif
CY=2kBT·Re[Y] C
Z=2kBT·Re[Z]
Tableau 1 : Matrices de corrélation pour trois représentations
différentes du bruit électrique dans un quadripôle d'après [8].
dispositif
"non-bruité"
matrice
admittance
[Y]
dispositif
"non-bruité"
matrice
chaîne
[ABCD]
dispositif
"non-bruité"
matrice
impédance
[Z]

EVALUATION DU BRUIT DANS LES MOSFET SOI
131
Ainsi, une matrice de corrélation donnée au tableau 1 peut être facilement transformée en une
autre forme matricielle à l'aide des matrices de passage données au tableau 2. Le passage d’une
forme matricielle à une autre forme s’effectue par l'expression suivante :
h
finale originale
CTC T=⋅ ⋅ (8)
où T correspond à la matrice de passage et C est la matrice de corrélation. Le symbole h de Th
correspond à la conjuguée hermitienne, ou la transposée du conjugué de T. Cette propriété est
intéressante pour séparer de la mesure les effets liés aux plots et aux lignes d’accès du transistor.
Matrice finale
Matrice admittance
(CY)
Matrice impédance
(CZ)
Matrice chaîne
(CA)
Matrice
admittance
(CY)
10
01
T⎛⎞
=⎜⎟
⎝⎠
11 12
21 22
Z
Z
T
Z
Z
⎛⎞
=⎜⎟
⎝⎠
12
22
0
1
A
TA
⎛⎞
=⎜⎟
⎝⎠
Matrice impédance
(CZ)
11 12
21 22
YY
TYY
⎛⎞
=⎜⎟
⎝⎠
10
01
T⎛⎞
=⎜⎟
⎝⎠
11
21
1
0
A
TA
−
⎛⎞
=⎜⎟
−
⎝⎠
Matrice originale
Matrice chaîne
(CA)
11
21
1
0
Y
TY
−
⎛⎞
=⎜⎟
−
⎝⎠
11
21
1
0
Z
T
Z
−
⎛⎞
=⎜⎟
−
⎝⎠
10
01
T⎛⎞
=⎜⎟
⎝⎠
Tableau 2 : Matrices de passage pour transformée une matrice de
corrélation en une autre forme matricielle.
Une autre propriété des matrices de corrélation est de permettre l'association de différentes
conformations de quadripôles possédant chacune sa propre matrice de corrélation. Une matrice
de corrélation globale est obtenue à partir de la mise en parallèle, en série, ou en cascade de
plusieurs étages :
Quadripôles mis en parallèle : 12
YYY
CCC=+ (9)
Quadripôles mis en série : 12
Z
ZZ
CCC=+ (10)
Quadripôles mis en cascade : 21
11
h
A
AA
CACAC=+ (11)
où A1 correspond à la matrice chaîne de l'étage 1 et h, l'opérateur conjugué hermitien défini
précédemment.
1.2 Les quatre paramètres de bruit
Avant d'indiquer les techniques de mesure du bruit dans les micro-ondes, des paramètres
sont à définir comme la figure de bruit, la température équivalente de bruit ainsi que les quatre
paramètres de bruit. En effet, ceux-ci sont couramment employés pour modéliser le niveau de
bruit micro-ondes apporté par les circuits électroniques grâce, notamment, à leur simplicité
d'utilisation et leur lien direct avec les notions d'adaptation et de gain ou perte. Ils interviennent
directement également lors de la mesure du niveau de bruit dans les dispositifs à caractériser, et le
calibrage du banc de mesure.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
1
/
40
100%