Les exosquelettes

Les solutions
Les exosquelettes
Dans le domaine des solutions visant à faire remarcher un
paraplégique, deux ont véritablement débouchés sur des
résultats encourageants : les exosquelettes, qui deviennent déjà
une réalité, et la stimulation électrique et chimique de la moelle
épinière, qui elle en revanche demeure au stade de projet.
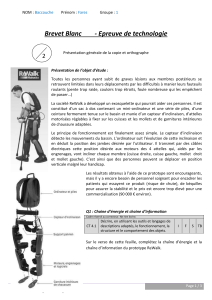
1) Présentation d'un exosquelette
Un exosquelette, en robotique, est un équipement articulé
et motorisé qui se fixe sur le corps au niveau des jambes et du
bassin voire également sur les bras.Il a pour but de faciliter les
mouvements ou bien de les remplacer en utilisant la force des
moteurs contenus dans l'équipement.
Dans le domaine médical l'exosquelette peut permettre à un
paraplégique de remarcher. Pour cela, l'exosquelette doit
reproduire les mouvements effectué par le corps lors de la
marche.
Le fonctionnement de l'exosquelette se base sur le
mouvement des ions potassium et sodium au niveau de zones de
contact entre un neurone et une cellule ou entre deux neurones,
ces zones sont appelées synapses. Pour se mettre en
mouvement, celui-ci capte le faible courant électrique d'environ
100mV généré par le déplacement de ses ions puis interprète les
informations transmises pour prévoir le mouvement que
l'utilisateur souhaite effectuer ; dans le cas d'un paraplégique, ce
déplacement ne peu être capté qu'à certains moments car il est
interrompu dans les parties du corps affectées par le
traumatisme.

Pour remédier à ce problème, d'autres capteurs ont été installés
sur les exosquelettes dédiés à l'usage médical
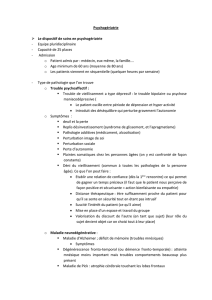
De plus, pour parvenir à réagir le plus tôt possible, les
capteurs bioélectrique responsable de la détection du
déplacement ionique sont assisté par un ordinateur contenue
généralement dans le dos du patient. Cet ordinateur a pour
fonction d'interpréter le message transmis par les capteurs de
l'exosquelette ainsi que de reconnaitre des mouvements
préenregistrer qui caractérise le début d'un mouvement du corps
humain. Par exemple, lorsque l'on souhaite se lever d'une
chaise, le haut du corps effectue un mouvement vers l'avant qui
lui est propre ; ce mouvement est repéré par l'exosquelette et lui
permet, grâce aux données préenregistrer d'anticiper les actions
du patient. Ce procédé a pour effet d'améliorer la vitesse
d'action de l'exosquelette.
capteurs d’inclinaisons moteurs et capteurs d’angles
ordinateur
et batterie
capteurs
bio
électrique

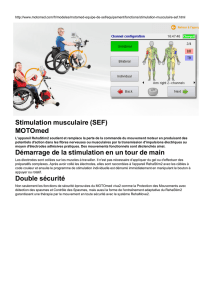
2) Deux exosquelettes différents : l'exemple du Rewalk et celui
du HAL
Le Rewalk
Le HAL (Hybrid
Assistive Limb)
le Rewalk utilise un boitier de
commande de la taille d'une montre
pour configurer les différentes actions à
faire tel que s'asseoir, se lever ou
même monter les escaliers.
Ses points forts sont :
-son autonomie, qui avoisine les 8
heures.
-son poids, qui n'excède pas les 20 Kg
en comptant la batterie.
Ses points faibles sont :
-sa vitesse, qui ne dépasse les 3Km/h
-son prix, qui tourne autour de 50000€.
De son côté, le HAL offre une
plus grande liberté à son utilisateur
puisque celui-ci n'a qu'à se
déplacer normalement pour activer
les fonctions de l'exosquelette ;
cela lui permet d'être plus maniable
mais en revanche moins rapide
puisque l'ordinateur doit d'abord
analyser les mouvements effectués
par le
corps du patient et calculer la
puissance nécessaire pour ces
mouvements.
ses points forts sont :
-son poids, qui est d'environ 23 Kg
-son système de marche, qui est
plus fluide que celui du Rewalk
ses points faibles sont :
-son autonomie, qui atteint environ
2h 30min
-sa vitesse qui oscille entre 3 et
4Km/h

Contrairement au Rewalk, dont la commercialisation a été
lancé pour les centres médicaux, le HAL ne peut pas être acheté
;il est simplement loué pour une durée allant de 6 mois à 5 ans.
L'utilisation de ces deux exosquelettes nécessite l'emploi
de béquilles pour pouvoir conserver son équilibre puisque le
corps d'un paraplégique n'en est plus capable et que
l’exosquelette lui même ne parvient pas à maintenir l’utilisateur
debout. En outre, le rôle de l’exosquelette se limite encore à
actionner le mouvement des jambes sans pouvoir pour autant
maintenir le patient debout en faisant varié son centre de
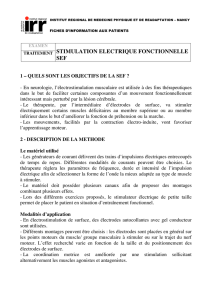
gravité. Cependant, les forces prises en compte pour la
conception de ce genre d’exosquelette ne se restreignent pas aux
forces de frottements et àla vitesse de chaque parties de
l’exosquelette (le pied, le genou et le bassin), la force de gravité
est aussi à prendre en compte pour « stabiliser l’exosquelette ».
g
V
v
v
f
Ensemble des forces prises en compte lors de la conception
d’un exosquelette.

La stimulation électrique
fonctionnelle
Les cellules impliquées dans la génération de mouvement, comme
les cellules musculaires et les cellules nerveuses, sont excitables.
La stimulation électrique fonctionnelle utilise cette propriété pour
récupérer, au moins en partie, l'usage de certaines parties du
corps. On distingue deux types de stimulation électrique
fonctionnelle : La stimulation électrique fonctionnelle externe et la
stimulation électrique implantée.
Ces deux méthodes demeurent à l’état de projet en ce qui concerne
la traite des lésions médullaires. En effet, de nombreuses
expériences ont été menées sur des rats paraplégiques mais même
si celle-ci sont prometteuses, on ne sait pas encore comment
appliquer ce traitement sur des humains.
Ces expériences, révèle qu’avec une stimulation chimique,
puis électrique, et un entraînement physique soutenu, la moelle
épinière se «réveille» et recommence à contrôler le mouvement des
jambes. De plus, ce mouvement est contrôlé par le cerveau ce qui
signifie que le rat contrôle à nouveau l’usage des membres
inférieurs de son corps.
 6
7
6
7
1
/
7
100%