A k

Systèmes hybrides
Adapté de Michael Negnevitsky

Adaptè de M. Negnèvistrsky et Benoit Lavoie.
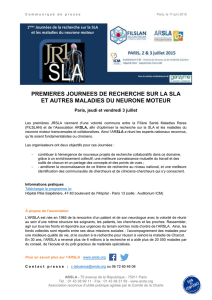
• Critères de comparaison
proposées par Negnevitsky (2002)
Caractéristique Description
Compréhensibilité des
représentations Facilité de compréhension des connaissances représentées
Tolérance à l’incertitude Robustesse face aux données manquantes
Tolérance à l’imprécision Robustesse face aux données imprécises
Adaptabilité Support pour de nouveaux types de données et de nouveaux
domaines
Capacité d’apprentissage Support pour l’apprentissage automatique des connaissances
Capacité de
découverte/fouille Support pour découvrir des connaissances parmi beaucoup
de données
Capacité d’explication Support pour le traçage du raisonnement
Facilité de développement Simplicité et rapidité du développement
Maintenabilité Simplicité de la maintenance
Support de connaissances
complexes Support pour représenter des connaissances complexes
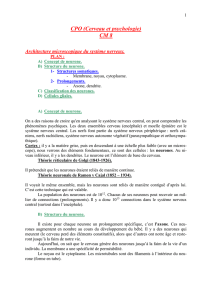
Comparaison de modèles

• Approches et évaluations possibles
Décrtis par Negnevitsky (2002)
Types d’approches
SE: système expert RN: réseau de neurones artificiels
LC: logique classique AG: algorithme génétique
LF: logique floue RB: réseau bayésien
AD: arbres de décisions
ON: ontologies
SC: schémas
BC: système à base de cas
Évaluation
- -: mauvais +/- : variable selon variantes
-: plutôt mauvais
+: plutôt bon
++: bon
Adaptè de M. Negnèvistrsky et Benoit Lavoie.
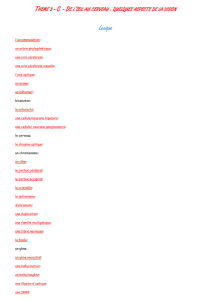
Comparaison de modèles

• Avantages et limites de chaque approche …
évaluation proposée par
Negnevitsky
Caractéristiques
Approches
symboliques Approches
sous-
symboliques
SE LC LF AD ON SC BC RN AG RB
Compréhensibilité des
Représentations +++ ++ ++ ++ + + - - - -
Tolérance à l’incertitude +++ ++ + + + + ++ ++ ++
Tolérance à l’imprécision +/- - - ++ + - - + ++ ++ +
Adaptabilité - - - - + - - - +/- ++ ++ +
Capacité d’apprentissage - - - - - - ++ +/- - - + ++ ++ ++
Capacité de découverte/fouille - - - - +/- + - - - ++ ++/-
Capacité d’explication ++ ++ ++ + + + + - - - +
Facilité de développement - - - - ++ - - - - - - - +
Maintenabilité - - + + ++ +/- - - ++ + +
Support de connaissances
complexes + + + - ++ ++ + - - - - - -
Comparaison de modèles
Adaptè de M. Negnèvistrsky et Benoit Lavoie.

Caractéristiques
Approches
symboliques Approches
sous-
symboliques
SE LC LF AD ON SC BC RN AG RB
Compréhensibilité des
Représentations +++ ++ ++ ++ + + - - - -
Tolérance à l’incertitude +++ ++ + + + + ++ ++ ++
Tolérance à l’imprécision +/- - - ++ + - - + ++ ++ +
Adaptabilité - - - - + - - - +/- ++ ++ +
Capacité d’apprentissage - - - - - - ++ +/- - - + ++ ++ ++
Capacité de découverte/fouille - - - - +/- + - - - ++ ++/-
Capacité d’explication ++ ++ ++ + + + + - - - +
Facilité de développement - - - - ++ - - - - - - - +
Maintenabilité - - + + ++ +/- - - ++ + +
Support de connaissances
complexes + + + + ++ ++ + - - - - - -
• Avantages et limites de chaque approche …
points forts démarquant les
approches symb. / sous-symb.
Comparaison de modèles
Adaptè de M. Negnèvistrsky et Benoit Lavoie.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
1
/
46
100%