Introduction à l`Apprentissage Artificiel


2
Plan Général
•Introduction à l'Induction (Laurent Orseau)
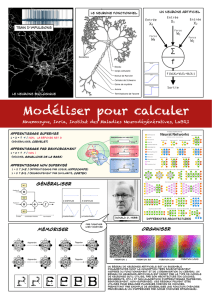
•Réseaux de Neurones
•Séparatrices à Vastes Marges
•Arbres de Décision
•Introduction au Data-Mining (Christine Martin)
•Règles d'Association
•Clustering
•Algorithmes Génétiques

3
Plan
•Introduction à l'Induction
Exemples d'applications
Types d'apprentissage
•Apprentissage Supervisé
•Apprentissage par Renforcement
•Apprentissage Non-supervisé
Théorie de l'Apprentissage (Artificiel)
•Quelles questions se pose-t-on ?

Introduction

5
Qu'est ce que l'apprentissage ?
•Mémoire
Acquisition de connaissance
Neurosciences
•A court terme (de travail)
rétention de 7±2 objets à la fois
(exemple du joueur d'échec professionnel, plateau aléatoire, plateau structuré)
•A long terme
Mémoire procédurale
» les enchaînements d'actions
Mémoire déclarative
» sémantique (concepts)
» épisodique (faits)
•Types d'apprentissage
Par coeur
Par règles
Par imitation / démonstration
Par essais-erreurs
•Réutilisation de la connaissance
Dans des situations similaires
Introduction
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
1
/
66
100%