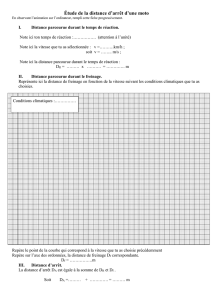
Freinage Moteurs Asynchrones Triphasés : Principes et Méthodes

Freinage des Moteurs
Asynchrones Triphasés

OBJECTIFS •A partir du schéma d’une installation,
identifier le mode et définir le principe de
fonctionnement du ou des systèmes de
freinage utilisés.
•A partir d’un cahier des charges choisir le
mode de freinage et le mettre en œuvre.
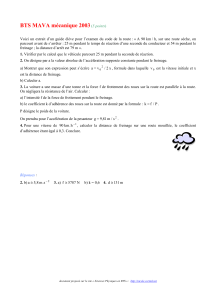
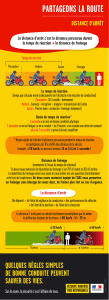
CAHIER DES CHARGES
Dispositif de levage entraîné par un moteur asynchrone
triphasé à rotor bobiné


CAHIER DES CHARGES
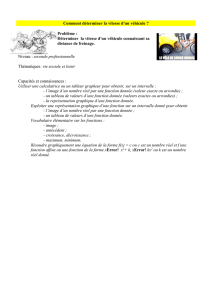
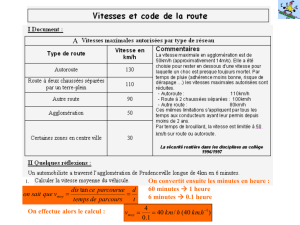
•Analyse du fonctionnement: GRAFCET
0
11 21
22
Immobilisation en position
Position basse
Ordre de monter
Position haute
Ordre de descente
Monter Descendre
Position haute
atteinte Distance d’approche
atteinte
Ralentir
Position basse
atteinte
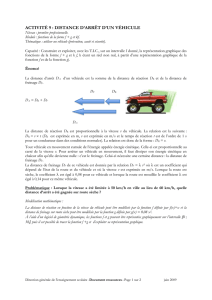
1-Immobilisation 2-Hypersynchrone 3-Injection courant continu 4-Contre courant

 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
1
/
33
100%