Ch 9 Moteur à courant continu

Ch 7 Moteur à courant continu
1. Principe et constitution d’un moteur à courant continu ( MCC )
1.1 Principe
Une machine à courant continu peut fonctionner en:
• moteur; elle reçoit de l’énergie électrique;
• génératrice par apparition d’une f.é.m. induite aux bornes d’un conducteur qui
se déplace dans un champ magnétique.
C’est un convertisseur d’énergie réversible.
Moteur
Génératrice
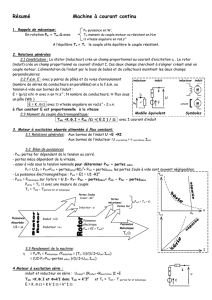
1.2 Constitution; f.é.m.
Un moteur est constitué de :
Énergie électrique Énergie mécanique

• un stator ou un inducteur;
• un rotor ou un induit.
Le rotor est séparé du stator par un entrefer. L’ensemble {stator,entrefer,rotor }
constitue le circuit magnétique.
Les bobines enroulées autour du noyau du stator et parcourues par un courant ie
sont la source de champ magnétique inducteur.
Le rotor contient des conducteurs logés dans des encoches. Lorsque ces conducteurs
sont parcourus par un courant et qu’ils sont placés dans le champ magnétique produit
par l’inducteur, il existe une force de Laplace ( F = BIlsinα) qui fait tourner le rotor .
Les conducteurs du rotor sont alors le siège d’une f.é.m. induite e alternative dont le
sens est indiqué par la loi de LENZ.
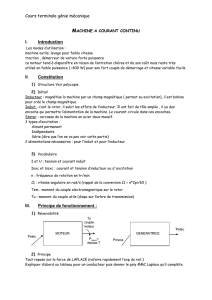
2. Modèle électrique de l’induit en régime permanent

Modèle de l’induit
IR
E U
Le moteur reçoit une puissance électrique : UI
Il apparaît une f.é.m. induite aux bornes de l’induit qui tourne dans le champ
magnétique de l’inducteur.
On montre que :
E ( en V ) est proportionnel à Φet à Ω.
Φ( en Wb ) : flux utile sous chaque pôle inducteur.
Ω ( en rad/s ) : vitesse de rotation de l’induit ( donc du moteur ).
K ( en V.Wb-1.rad-1.s ) : c’est une constante caractéristique du moteur.
R ( en Ω ) : résistance de l’induit que l’on mesure à chaud. Elle a souvent une valeur
faible. Exercice 1 ( 1.1 et 1.2 )
E = KΦΩ

3. Couple électromagnétique
Puissance électromagnétique de la machine :
Pem = EI Pem ( en W ) ; E ( en V ) ; I ( en A ).
Le moment du couple électromagnétique Tem représente la somme de tous les moments
des couples des forces de Laplace.
La puissance électromagnétique est développée par le couple Tem tournant à la vitesse
Ω.
TemΩ= EI Tem =
Comme E = KΦΩ
Tem ( en N.m ) ; I ( en A ) ; Φ( en Wb ).
Ex 1 ( 1.3 ) ; Ex2
EI
Tem = KΦI

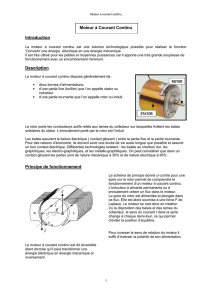
4. Moteur à excitation indépendante
Il existe plusieurs types d’excitations. On travaillera avec une excitation indépendante:
la bobine d’excitation est sur l’inducteur et indépendant de l’induit.
Une variante : l’excitation est fournie par un aimant permanent: le flux Φ est constant.
4.1 Modèle du moteur et vitesse de rotation
ie ( ou J ) I
RU
ue ( ou V ) r E
INDUCTEUR INDUIT
E = KΦΩ U = KΦΩ + RI
ue = r ie U = E + RI
KRI - U
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%