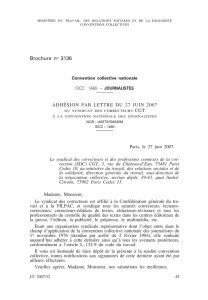
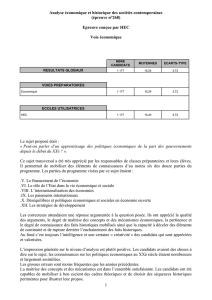
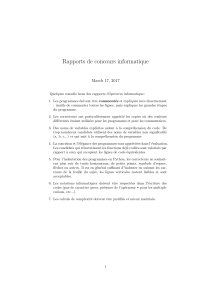
Régulation et Asservissement





Principe
Modélisation
Stabilité
Précision
Rapidité
Correcteurs
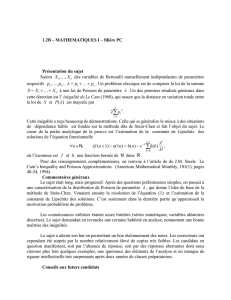
H(p)
K(p)
(p)
Xs(p)
Xc(p)
Chaîne directe
Chaîne de retour
Xr(p)
F(p)
C(p)
G(p)
Transmittance en boucle fermée
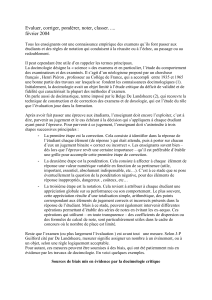
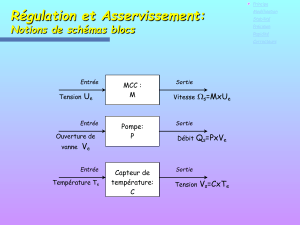
Régulation et Asservissement:
Notions de schémas blocs
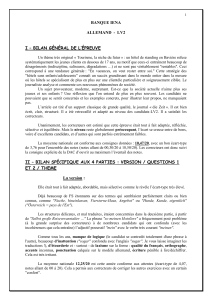
() ()
() ( ) 1 ( ) ( )
s
e
Xp Hp
Fp X p K p H p
(1)
(2)
(3)
(1)&(2)
&(3)
1
() 1
Cr
S
Sr
C r S
C S S
C S S
CS
S
C
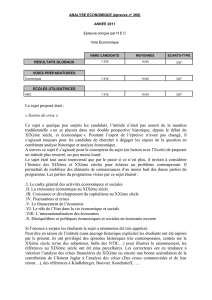
XX
HX
X K X
X X H X
X X K H X
X H X X K H
X H X KH
XH
Fp X KH
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
1
/
39
100%