Slides - indico in2p3

27 Mai 2005 M-H Aumeunier
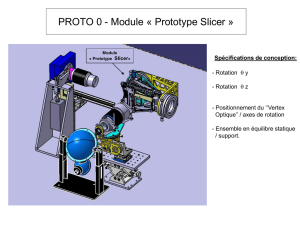
Design du démonstrateur
Folding Mirror Steering mirror (tilt variable)
•contourne le problème pour parcourir tout le plan du slicer
(champ limité initialement par l’ouverture du collimateur)
• Angle d’incidence sur le slicer + grand aberrations?
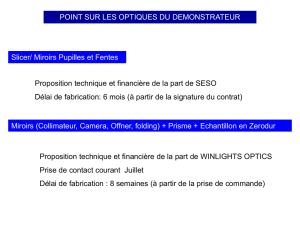
Collimated Beam
Steering
Mirror
Slicer Pupil Mirrors
Slits Mirrors
Prism
Detector Plane
Folding
Mirror
Collimator
Small Imager
Mirror
Focus
Mirror
Collimator
Entrance Pupil
Large Imager
Mirror
OFFNER RELAY
SLICER IMAGER
SPECTROMETER
NEW :

Etat des devis
Devis slicer- miroirs pupilles et fentes
En attente de la réponse de SESO
Devis des miroirs
définition des miroirs: 5 miroirs sphériques, 1 prisme, 1 miroir
plan (voir doc « Request of quotation : optical reflective surfaces for an IFU
design »)
premier contact avec Winlight System (P.Karst)
DEMONSTRATEUR

Module re-imageur
Module spectro
Module slicer
Détecteur
Module
d’illumination
Procédure d’alignement
Faisceau collimaté
Alignement des modules indépendamment
des uns par rapport aux autres
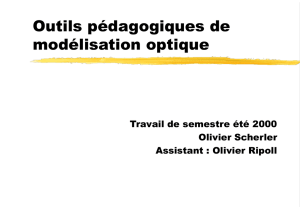
DEMONSTRATEUR

Design Optique
Calcul de la position du point image et des aberrations
associées (Zernike) dans les plans images du système pour
un nombre fini de points du plan objet (x0,y0)
ZEMAX
PAW
Interpolation par réseau de neurones
IDL
Simulation de la diffraction et des aberrations
Simulation du système optique
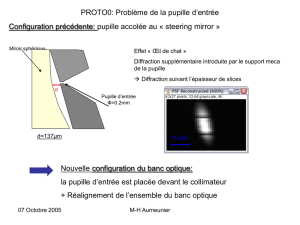
PROTO 0

Entrance Pupil
Slicer
Pupil Mirrors
Slit Mirrors
Aperture Plane Field of view of one slice
5 active slices
24 points on x
5 points on y per slice
x
y
Image Plane
Pupil Plane
Modélisation du système optique Proto0
Dans chaque plan image, on calcule:
•les distorsions (optique géométrique)
•les aberrations (Coeff. de Zernike)
•la diffraction (optique de Fourier)
PROTO 0
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%