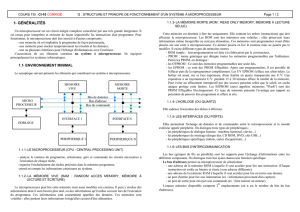
Architecture d `un système à MICROPROCESSEUR

Architecture d ’un
système à
MICROPROCESSEUR
©T.Berenguer Juin 2008

Applications des microprocesseur
1

Qui a inventé le microprocesseur ? quand ? En 1971
Un peu d ’histoire
•Composant micro programmé
•4 bits
•2300 transistors
•Horloge 100 Khz
•Développé par INTEL pour BUSICOM
2

Pourquoi un microprocesseur ?
•Intel a initialement produit des mémoires.
•Busicom, fabricant japonais de machines à calculer, lui demande en 1969 de
mettre au point douze circuits intégrés pour assurer les fonctions de ses
machines.
•Un ingénieur d’Intel, Ted Hoff, propose de concevoir un circuit intégré
programmable unique pour réaliser l’ensemble de ces fonctions.
•Busicom approuve cette solution. Le travail fut réalisé en neuf mois sous la
direction de Federico Faggin. Le 4004 est né en 1971. C’est le premier
microprocesseur.
•Il a autant de puissance de calcul que l’ENIAC.Il utilise un « chemin de
données à 4 bits » , ce qui le rend utilisable pour des automatismes ou des
calculettes mais non pour construire un ordinateur.
•Intel rachète pour 60 000 $ les droits de Busicom sur le 4004 (peu après,
Busicom fit faillite). Il faut trouver d’autres clients. Intel se lance dans une
communication active pour convaincre la profession d’écrire des logiciels pour
le 4004 et de l’utiliser pour des automatismes comme le contrôle des feux de
circulation.
3

Organisation
Bus
Entrées
Sorties
Stockage
•du programme
•des données
•Gestion du système
•Exécution du programme
•Communication
•Adaptation électrique
Microprocesseur périphériques
4
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%