ppt - chimphys

Bilan du groupe sur l’activité ballon, sonde :
Maîtrise d’Excel : excellente 5/ 5
Compte rendu : bien quand elle a été possible 4/ 5
argumentation satisfaisante
complet
pas toujours envoyé et pour cause !
Exploitation des données : 4,5 / 5
Courbe bien tracées
Analyse satisfaisante mais un poil incomplète
Activité en classe : très satisfaisante 5 / 5
malgré tous les problèmes rencontrés !
Avant correction finale et envoi de
prédiction trajectoire 18,5 /20

Capteur de vitesse ascensionnelle (n°3)
1.Différents types de capteurs permettant de mesurer une vitesse
a. Effet Hall
b. Dynamomètre
c. Baromètre
d. Anémomètre
2.Utilisation d’une photorésistance
a. Domaine de validité
b. Etalonnage
3.Utilisation d’un phototransistor
a. Domaine de validité
b. Etalonnage en fréquence
c. Conversion de la fréquence en tension
d. Etalonnage final (en tension)
4. Fiche récapitulative de notre capteur
5. Résultats
6. Données et interprétations
Voir aussi le fichier Excel éponyme.
Données prévues concernant le ballon :
Altitude : 30 km
Vitesse de montée : 5 m/s
Vitesse de descente : 25 m/s (valeur maximale, sans parachute)
Sommaire :
DURIVAUX Thibaud
BROFIGA Roméo
2°14 –MPI 09/10 La feuille du fichier Excel a été corrigé
Compte rendu : une bonne analyse mais incomplète, a finir

1. Capteur à effet Hall
Le principe de l’effet hall consiste à « compter » le nombre de passages d’un objet métallique devant un capteur
électronique (par exemple, les rayons d’une bicyclette). Ensuite, on détermine une vitesse en ayant le nombre d’objets
passés en un temps donné (vitesse en fonction de la fréquence).
On n’utilisera pas ce principe car il est plus difficile à réaliser que celui que nous avons choisi.
2. Dynamomètre
Un dynamomètre mesure un poids (or celui ci varie en fonction de l’altitude) :
P = m * g (g variant en fonction de l’altitude).
On pourrait ainsi déterminer un coefficient de diminution de cette valeur, et, par conséquent, une vitesse ascensionnelle.
Cependant, le ballon n’est pas capable d’atteindre une altitude supérieure à 30 km, or le poids, sur une telle distance, ne
variera que de moins de 1%.
3. Baromètre
4. Anémomètre
On intercale l’hélice d’un anémomètre entre une DEL haute luminosité et un capteur permettant de mesurer une
fréquence. On mesurera donc la fréquence de passage d’une pale, ce qui nous permettra d’établir une courbe
d’étalonnage (vitesse en fonction de la fréquence). Dans un premier temps, on va utiliser une photorésistance pour
mesurer cette fréquence.
Différentes manières de déterminer une vitesse
)(2 st pp
v
d
p
v2
v vitesse
ptpression totale
pspression statique
pdpression dynamique
masse volumique de l'air
Sommaire
Cependant, le capteur de pression dynamique
est difficile à mettre en œuvre car les tubes le
composant devraient toujours être
parfaitement perpendiculaires à l’écoulement
du fluide (de l’air). Cela n’est pas réalisable sur
notre nacelle car elle tournera constamment
et sera sujette à des turbulences.
Nous n’utiliserons donc pas ce principe.
Ce n’est pas ça la raison mais le fait que la différence de pression attendue n’était mesurable à partir des
2 capteurs de pression

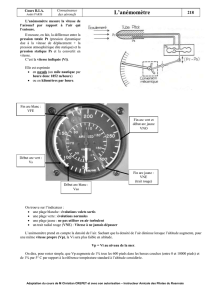
a. Domaine de validité
On constate que pour des valeurs de fréquence supérieures à
1100 Hz, la photorésistance ne donne plus de valeurs cohérentes.
Vitesse du flux d'air Fréquence de passage des pales
V(flux d'air) F(fréquencemètre)
km/h kHz
0 0
5 0,16
10 0,32
15 0,46
20 0,61
25 0,76
30 0,88
35 1,03
40 1,14
45 1,31
50 1,46
55 1,61
60 1,71
b. Etalonnage
On prend une série de mesures et on
détermine le coefficient directeur de la
droite obtenue. Ici, on ne dépasse pas le
domaine de validité du capteur.
Ainsi, la fréquence mesurée par le
fréquencemètre est proportionnelle à la
vitesse ascensionnelle du ballon (lue sur
l’écran de l’anémomètre).
En utilisant une photorésistance Sommaire

a. Domaine de validité
On constate que pour des valeurs de vitesses supérieures à
75 km/h, le phototransistor ne donne plus de valeurs de fréquences
cohérentes.
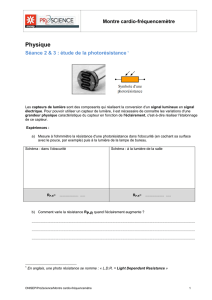
b. Etalonnage
On prend une série de mesures et
On détermine le coefficient directeur de la
droite obtenue.
Ces valeurs peuvent être considérées
comme justes car on ne sort pas du
domaine de validité du capteur, en effet,
on peut considérer que le ballon n’ira pas
àdes vitesses dépassant 25 m/s.
En utilisant un phototransistor
Ainsi, la fréquence mesurée par le fréquencemètre est proportionnelle
àla vitesse du flux de l’air passant dans l’anémomètre.
F = 0,10 * V
0.0
0.5
1.0
1.5
2.0
2.5
0.0 5.0 10.0 15.0 20.0 25.0
F (en Hz)
V (en m/s)
Fréquence passage des pales F en
fonction de la vitesse du vent V
0.0
0.5
1.0
1.5
2.0
2.5
0.0 20.0 40.0 60.0 80.0 100.0 120.0
F (en Hz)
V (km/h)
Fréquence de passage des pales F en
fonction de la vitesse du vent V
Sommaire
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%