Document

1
La variation de vitesse des
moteurs à courant continu



4
Stator
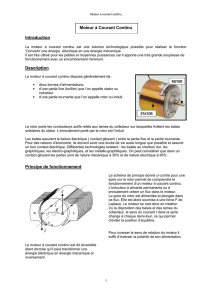
On peut retenir 3 parties :
- fixation du moteur
(bride ou support de fixation)
- la boite à bornes (câblage)
- la culasse
Voir catalogues
constructeurs
La culasse forme la partie extérieure.
Sa fonction :
- Supporter tous les éléments constitutifs d ’une MCC
- Guider les lignes du champ inducteur.
Elle peut être constituée d ’acier massif car le flux est fixe
retour

 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
1
/
70
100%