Aucun titre de diapositive

Domaines d’intérêt
•Traitement du signal et des images
•Fusion des informations sensori-motrices au niveau du SNC
•Muscles artificiels
•Systèmes de Contrôle inspirés de la biologie
•Contrôle sensori-moteur des mvms de la main
(biologique et artificielle)
Bureau + Lab: INSERM U.742 -ANIM, 7 quai St. Bernard, Bâtiment A,
2ème étage, Pièce A203, Jussieu, 75005, Paris
E-mail: selim@ccr.jussieu.fr
URL: http://www.aass.oru.se/~ser/
Tél.: 01 44 27 23 79
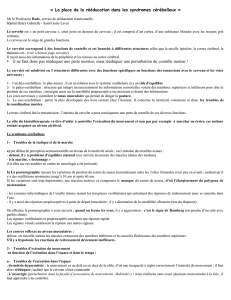
UE NEO234 Les aspects computationnelles du contrôle moteur
Les modèles du contrôle moteur volontaire
T. Selim Eskiizmirliler (Ph.D ENST, MCF Paris 7)

Séance 1 :
•Rappel des aspects neurobiologiques du Contrôle Moteur.
•Les aspects computationnels du contrôle moteur
•Les modèles des circuits neuronaux, Ex: Modèle du cervelet
Séance 2 :
•Modélisation de la fusion des Informations Sensori-Motrices
•Application du modèle proposé à la prédiction des cinétoses dans les
trains pendulaires à grande vitesse (TGV pendulaire).
•Application du modèle au contrôle d’un actionneur à 1 ddl mû par des
muscles pneumatiques de McKibben.
•Séance 3:
•Une architecture multi réseaux d’apprentissage multimodale pour
contrôle moteur des mvm d’atteindre et de saisir inspirée de la
connectivité cortico cortical.
•Application du modèle sur un bras « anthropomorphique » à 7 ddl
équipé d’une main à 3 doigts.
•Projet Européens PALOMA, NEUROBOTICS.
•Projets actuels de l’équipe 2 de l’INSERM U742
•Qu’est-ce qui se passe ailleurs?
UE NEO234 Les aspects computationnelles du contrôle moteur

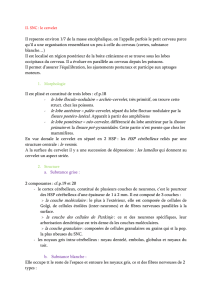
UE NEO234 / Un peu d’histoire
Anatomical drawing by Leonard de Vinci. The
Santa Maria Nuova hospital, Florence (1504-
1507).
May be not since Aristotle (384-322 BCE),
who believed that the brain is composed of soil
and water ,
but, since Herophilus (330-260BC) ,
who took the decisive step by identifying the
nerves of movement and sentiment, and hereby,
located the intelligence in the brain,
it is known that the sensory and motor regions of the Central
Nervous System (CNS) exchange information via anatomical
connections and so they provide the PERCEPTION and THE
CONTROL OF BODY MOVEMENTS.
La science est où le plaisir et la curiosité se rencontrent.
St. Augustin

UE NEO234 / Un peu d’histoire
Cardiocentristes
Aristotle (384-322 BCE.)
"Le cœur est le centre de la pensée et des émotions.
Galen (129-210 AD)
Un réseau admirable "rete mirable" entre le coeur et la tête par où
l'énergie vitale est transmis du cœur à la tête .
Cephalocentristes
Democrite (469-399 BC) :
"Le cerveau est la citadelle du corps. Il est le guardian de l'intelligence
et de la pensée".
Hippocrates (460?-377?BC):
"Si le cerveau est irrité, l'intelligence sera perturbée."
Herophilus (330-260 BC)
"L'intelligence est situé dans le cerveau". Distinction des nerfs de
"sentiment" et de "mouvement".
Le choix semble ne pas encore être fait :
Shakespeare (1564-1616) (AD)
"Dis moi où l'amour est situé, dans le cœur ou dans la tête? "

UE NEO234 Les aspects neurobiologiques du mouvement volontaire
Architecture et fonctions
Apprentissage, contrôle,
Coordination des
mouvements
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
1
/
42
100%