Print your poster

RESEARCH POSTER PRESENTATION DESIGN © 2012
www.PosterPresentations.com
Conception
Assistée
par
Ordinateur
Si nous observons un ordinateur, nous remarquons qu’il possède des endroits nous permettant
de connecter des périphériques comme le moniteur, le clavier, la souris etc. Ce sont ces endroits
là que nous appelons interface.
Les cartes électroniques connectés verticalement à la carte mère et assurant la communication
entre les périphériques et la carte mère, sont appelés cartes d’interfaces d’entrée-sortie.
L’objectif préliminaire est de manipuler un langage de programmation afin d’arriver à réaliser
une application capable de transmettre des ordres émis par l’utilisateur vers des cerveaux
moteurs ou des moteurs à courants continus.
Par conséquent, nous avons choisi à mener une réalisation électronique comme une carte de
communication (PC moteur) en examinant chaque partie de cette carte.
Introduction
------- ------- --------- --------Tâche global--------- --------- -------- -------
------ ----- ------ ------ ------ ------Tâche II------ ------ ------- ------ -------
-
------ --------- ------ ------ ------Tâche III--------- ------- ---------- ----
------ --------- ------ ------ ------Tâche IV--------- ------- ---------- ----
Mr: Rezoug Mohamed redha/Senoussaoui Majda –Siagh Marwa.
Université de Kasdi Merbah-Ouargla
Faculté de sciences appliquées Department de génè électrique
Etude et réalisation d’une carte d’interface de commande et
contrôle pour quatre cerveaux moteurs via le port série
0100111
0110…
Trame
d’informations
PC
Carte
d’interface
Le passage RS232
Bloc de puissance
Sens de
rotation
-------- ------- ------ ------- -----Tâche I----- ----- ------- ------- ------- ----
MPLAB
Langage assembleur
Code ASM
ASM est un langage de
bas niveau qui
représente le langage
machine sous une forme
lisible par un humain
Fichier Hexadécimale
CAO
ISIS proteus v.7
Schématique
programme
Simulation
virtuelle
Exécution
Programmateur
des pic USB
Programme
source que le
concepteur va
définir est une
suite d’ordre
Interface pi kit
v2.6
Pic 16F877
Un
microcontrôleur
est un composant
électronique
autonome
Interface
Delphi
Dispositif réalisé
Microcontrôleur
Driver
RS232
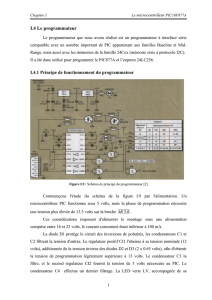
L'objectif visé est la conception d'un circuit d’interfaçage entre un
Ordinateur et des drivers (moteurs, lampes …) chargé d’exécuter les
commandes reçues du PC à travers une liaison de type RS232. Pour satisfaire
cet objectif, le microcontrôleur PIC16f877A de la société MICROSHIP®a
été choisi. Il s'agit d'un microcontrôleur alimenté à 5V et possédant un jeu
d'instructions réduit (RISC) qui s’intègre essentiellement dans un boîtier à 40
broches. Il forme ainsi un ensemble d'une grande facilité d'utilisation sans
bus de données ni adresses puisque seul les broches nécessaires à
l'application sont accessibles.
Donc, on peut présenter deux algorithmes dont le premier résume la
démarche du programme maître « environnement delphi7®» et le second le
programme esclave « environnement MPLAB8.90®».
Pour que l’ordinateur communique avec le microcontrôleur, il nous faut
un port de communication, pour cela, nous avons choisi le port série «le DB9
RS232 » comme un protocole pour changement des données dues à sa
simplicité de programmation, sa vitesse de transmission, organisation de ces
trames…
D’où, nous avons configuré une application pour connaître les différents
ports comme matériel pour ne pas tomber en conflit en changeant
l’application d’un PC à un autre, et il nous reste à choisir que le port désiré,
lors de l’exécution du programme
borde
Le logiciel
MPLAB est un outil
de développement pur
programmer de
microcontrôleur de
type pic de la famille
microchip.
microprocesseur+
périphérique
interne(RS232)
traitement
d’information
Moteurs,
Lampes…
Vers microcontrôleur
Fichier Hexadécimale
Fichier Hexadécimale
?
Un langage de
bas niveaux qui
représenté le langage
machine sous une
forme lisible par un
humain
1
/
1
100%