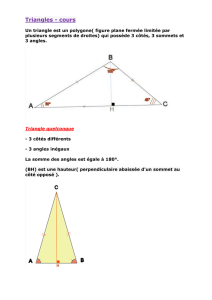
bo - somme des distances d`un point a un ensemble fini de

BO - SOMME DES DISTANCES D’UN POINT
A UN ENSEMBLE FINI DE POINTS
Soit n≥3. On se donne npoints distincts A1,...And’un espace affine euclidien Epde dimension p.
La norme d’un vecteur −→
Vdans l’espace vectoriel associé est notée k−→
Vk.
Pour tout nombre entier k≥1, on définit une application fkde Epdans Rpar
fk(M) =
n
X
i=1
k−−−→
AiMkk.
Proposition 1 Pour tout entier k≥2, la fonction fkest de classe C1sur Ep, et f1est de classe
C1sur Ep\{A1,...,Ap}.
Si l’on pose
g(M) = k−−→
AMkk= ((−−→
AM)2)k/2,
on a −−−→
grad g(M) = k
2((−−→
AM)2)k/2−12−−→
AM =kk−−→
AMkk−2−−→
AM ,
et donc
−−−−→
grad fk(M) = k
n
X
k=1
k−−−→
AiMkk−2−−−→
AiM .
La fonction −−−−→
grad fkest donc continue si k≥2. En particulier
−−−−→
grad f2(M) = 2
n
X
k=1
−−−→
AiM .
Par contre
−−−−→
grad f1(M) =
n
X
k=1
−−−→
AiM
k−−−→
AiMk,
et la fonction −−−−→
grad f1est continue sauf aux points Ai.
Proposition 2 On suppose que les points Aine sont pas alignés. La fonction fkadmet un
minimum absolu sur Epqui est atteint en un unique point Gk.
Si k≥2, alors Gkest l’unique point stationnaire de fk.
Si k= 1, ou bien G1est l’unique point stationnaire de f1, ou bien G1est un des points Ai.

BO 2
•Existence d’un minimum absolu.
La fonction fkest positive et possède donc une borne inférieure dans Ep. Posons
ak= inf
M∈Ep
fk(M).
Notons également
r= max
1≤i≤nk−−→
OAik.
Si l’on prend un point Mtel que
k−−→
MOk> r ,
on a alors
k−−−→
MAik ≥ k−−→
MOk − k−−→
OAik ≥ k−−→
MOk − r > 0,
et
fk(M)≥n(k−−→
MOk − r)k,
ce qui prouve que fk(M)tend vers l’infini lorsque k−−→
OMktend vers l’infini. Il existe donc Rtel que
k−−→
MOk> R
implique
n(k−−→
MOk − r)k≥ak+ 1 .
Alors, dans le complémentaire de la boule ouverte B(O, R)de centre Oet de rayon R, on a
fk(M)≥ak+ 1 .
Il en résulte que
inf
M∈B(0,R)fk(M) = inf
M∈B(0,R)
fk(M) = ak.
La fonction fkatteint alors son minimum sur la boule fermée qui est compacte. Donc il existe un point
Gkdans la boule fermée telle que
fk(Gk) = ak.
Ce point ne peut se trouver au bord de B(O, R). Il est donc dans la boule ouverte et, si p≥2, c’est
un point stationnaire de fk. C’est encore le cas lorsque p= 1, si le point stationnaire n’est pas un des
points Ai.
•Unicité du point stationnaire
Soit Gun point stationnaire de fk, c’est-à-dire un point tel que
−−−−→
grad fk(G) = −→
0,

BO 3
On a donc
(1)
n
X
i=1
k−−→
AiGkk−2−−→
AiG=−→
0.
Si Mest dans Ep, on a
k−−→
AiGk2=−−→
AiG(−−−→
AiM+−−→
MG) = −−→
AiG−−−→
AiM+−−→
AiG−−→
MG ,
et, en utilisant l’inégalité de Schwarz,
k−−→
AiGk2≤ k−−→
AiGkk−−−→
AiMk+−−→
AiG−−→
MG ,
Multiplions par kAiGkk−2et sommons sur i. On obtient
fk(G)≤
n
X
i=1
k−−→
AiGkk−1k−−−→
AiMk+ n
X
i=1
k−−→
AiGkk−2−−→
AiG!−−→
MG .
Comme la parenthèse est nulle d’après (1), il vient
fk(G)≤
n
X
i=1
k−−→
AiGkk−1k−−−→
AiMk.
Lorsque k= 1, cela donne
f1(G)≤f1(M).
Lorsque k≥2, on utilise l’inégalité de Minkowski avec r=ket s=k/(k−1) qui sont deux nombres
plus grands que 1tels que 1
r+1
s= 1 .
Alors
fk(G)≤ n
X
i=1 k−−→
AiGkk−1k/(k−1)!(k−1)/k n
X
i=1
k−−−→
AiMkk!1/k
.
D’où
fk(G)≤(fk(G))(k−1)/k (fk(M))1/k ,
et finalement
fk(G)≤fk(M).
Si Mest distinct de G, les vecteurs −−→
AiGne sont pas tous colinéaires au vecteur −−→
MG, sinon les points
Aiseraient alignés, donc, au moins une des inégalités
−−→
AiG−−→
MG ≤ k−−→
AiGk k−−→
MGk
est stricte et l’on a
fk(G)< fk(M).

BO 4
Cela prouve l’unicité du point stationnaire s’il existe, ce qui est le cas en particulier lorsque k≥2, et
montre dans ce cas l’unicité du point où fkatteint son minimum.
•Cas k= 1.
Lorsque k= 1, il reste à voir que lorsqu’il n’existe pas de point stationnaire, alors f1atteint son
minimum en un et un seul des points Ai.
Etudions la restriction de f1à une droite. Soit t7→ M(t)un paramétrage d’une droite de vecteur
directeur −→
U, et posons
h(t) = f1(M(t)) ,
On a donc −−−→
OM′(t) = −→
U ,
d’où
h′(t) = −−−−→
grad f1(M(t))−→
U=
n
X
i=1
−→
U−−−→
AiM(t)
k−−−→
AiM(t)k,
et également
h′′(t) =
n
X
i=1
k−−−→
AiM(t)k2k−→
Uk2−(−→
U−−−→
AiM(t))2
k−−−→
AiM(t)k2.
Donc hest de classe C2en dehors des points Aiqui se trouvent sur cette droite. Comme il existe au
moins un point Aien dehors de cette droite, au moins un des nombres
k−−−→
AiM(t)k2k−→
Uk2−(−→
U−−−→
AiM(t))2
est non nul et h′′ est strictement positive. Donc h′est strictement croissante. Si h′gardait un signe
constant, alors hserait monotone, ce qui n’est pas possible puisque h(t)tend vers l’infini lorsque |t|
tend vers l’infini. Il en résulte que h′(t)change de signe en un point t0et un seul.
Donc hest strictement décroissante sur ]−∞, t0[et strictement croissante sur ]t0,+∞[. Elle admet
un minimum en t0et ce minimum est unique.
En particulier, si l’on prend la droite passant par Aiet Aj, elle ne peut admettre un minimum qu’en
un seul de ces points. Donc si fkatteint son minimum en un point Ai, elle ne peut l’atteindre en un
autre. Le minimum est donc atteint en un point unique également dans ce cas.
Corollaire Si A1...,Ansont les sommets d’un polygone plan convexe, le point Gkappartient
à la surface limitée par ce polygone.
C’est vrai si Gkest un des sommets. Sinon il vérifie la relation (1). Dans ce cas Gkest le barycentre
des sommets affectés de coefficients positifs. C’est donc un point situé dans la surface limitée par le
polygone.

BO 5
Proposition 3 Si l’ensemble {A1,...,An}est invariant par une isométrie Φ, alors Gkest un point
fixe de l’isométrie. En particulier, si Φest une rotation, alors Gkest le centre de cette rotation.
On a pour tout point M
fk(Φ(M)) = fk(M).
Donc
fk(Φ(Gk)) = fk(Gk)
réalise le minimum de fk, et par unicité de Gk, on en déduit que
Φ(Gk) = Gk.
Remarque : d’après la relation (1), le point G2n’est autre que l’isobarycentre des points Ai.
Etude du cas k= 1
La relation (1) s’écrit
n
X
i=1
−−→
AiG
k−−→
AiGk=−→
0,
et en posant
−→
Ui=
−−→
AiG
k−−→
AiGk
cela s’écrit n
X
i=1
−→
Ui=−→
0.
Le problème revient donc à la recherche de nvecteurs unitaires de somme nulle.
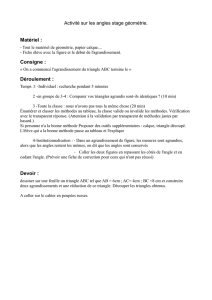
Cas d’un triangle
Théorème de Schruttka Dans tout triangle ABC dont les angles sont inférieurs à 2π/3, il
existe un point Geu un seul, appelé point de Torricelli du triangle, dont la somme des distances
aux sommets soit minimale. Ce point Gest tel que les angles \
AGB,\
BGC et [
CGA soient égaux à
2π/3.
Si un des angles du triangle est supérieur à 2π/3, le minimum est atteint au sommet correspondant.
La relation (1) revient donc à trouver trois vecteurs unitaires −→
U,−→
V,−→
Wtels que
−→
U+−→
V+−→
W=−→
0,
ou encore −→
U+−→
V=−−→
W .
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%