AP14 - MECANIQUE DE NEWTON - cours

AP14 - MECANIQUE DE NEWTON (SUITE)
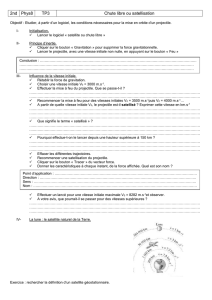
EXERCICE 5 : Le trébuchet
Le trébuchet est une machine de guerre utilisée au Moyen-Âge au cours des
sièges de châteaux forts.
Le projectile pouvait faire des brèches dans les murailles des châteaux
forts situés à plus de 200 m du trébuchet.
Un contrepoids relié à un levier est maintenu à une certaine hauteur.
Il est brusquement libéré. Au cours de sa chute, il agit sur un levier au bout
duquel se trouve une poche en cuir dans laquelle est placé le projectile.
Lors de sa libération, le projectile de la poche se trouve à une hauteur H = 10 m
et est projeté avec une vitesse v0
faisant un angle
avec l'horizontale. Le
mouvement du projectile s'effectue dans un champ de pesanteur uniforme.
Données :
masse du projectile m = 130 kg.
intensité du champ de pesanteur g = 10 m.s 2.
hauteur du projectile au moment du lancer : H = 10 m.
Le système étudié est le projectile. Les frottements de l'air et la poussée d'Archimède sur le projectile seront
négligés dans cette étude. Le champ de pesanteur g
est parallèle à l'axe (Oz).
1. Donner les caractéristiques (sens, direction et valeur) du poids P
du projectile.
2. En appliquant la deuxième loi de Newton dans le cadre de la chute libre, déterminer les coordonnées ax et az du
vecteur accélération du centre d'inertie du projectile dans le repère indiqué.
3. Les coordonnées du vecteur vitesse initiale sont
v0
v0x = v0.cos
v0z = v0.sin
Déterminer l'expression des coordonnées horizontale et verticale vx(t) et vz(t) du vecteur vitesse V
du système
au cours de son mouvement.
4. En déduire la nature du mouvement du projectile en projection sur l'axe horizontal. Justifier.
5. Déterminer l'expression des équations horaires du mouvement du projectile donnant x(t) et z(t).
6. Montrer que l'équation de la trajectoire du projectile est la suivante
:
z = – 1
2.g
v2
0.cos2.x2 + x.tan + H
7. En utilisant l'équation de la trajectoire, indiquer les paramètres de lancement (pour un trébuchet donné) qui
jouent un rôle dans le mouvement du projectile.
8. Dans le cas où le projectile est lancé avec une vitesse initiale horizontale, montrer que l'abscisse de son point de
chute est : x = v0.2.H
g
9. Avec quelle vitesse initiale v0 horizontale, le projectile doit-il être lancé pour atteindre la base du mur situé à
une distance x = 100 m ?
z
v0
H
x
O sol

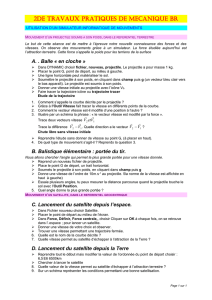
EXERCICE 6 : Déviation dans un champ électrostatique
Un champ électrostatique uniforme de valeur E = 5 200 V.m1, est créé par un
condensateur plan constitué de deux armatures planes et horizontales A1 et A2
reliées à un générateur de tension. Des électrons pénètrent dans le champ E
à
l'ordonnée y0 et sont animés de la même vitesse v0
parallèle aux plaques.
Données :
Masse de l'électron : m = 9,1.10 31 kg. Charge élémentaire : e = 1,6.10 19 C.
Intensité du champ de pesanteur local: g0 = 9,81 m.s 2.
1. Montrer par un calcul qu'il est légitime de négliger la valeur du poids P
de l'électron (modélisant l'action de la Terre
sur l'électron) par rapport à la valeur de la force électrostatique F
(modélisant l'action du champ E
sur l'électron).
2. En citant la loi utilisée, établir l'expression vectorielle de l'accélération de l'électron en fonction de e, m et E
.
3.
3.1. On souhaite que l'électron soit dévié vers le bas. Reproduire la figure ci-dessus et représenter (sans souci
d'échelle) E
et la force électrostatique F
.
3.2. Quelle est l'armature chargée positivement ?
4.
4.1. Exprimer les composantes du vecteur accélération dans le repère représenté sur la figure ci-dessus.
4.2. En déduire les équations horaires du mouvement de l'électron dans ce repère.
4.3. Montrer que l'équation de la trajectoire est de la forme : y = A.x2 + B où A et B sont des constantes à déterminer.
4.4. Vérifier que la constante A est liée à l'accélération « a » par la relation : A = a
2.v2
0
.
4.5. Calculer A pour v0 = 1,5.10 7 m.s 1.
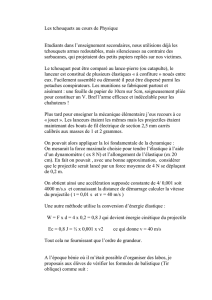
EXERCICE 7 : Le système de positionnement Galiléo
Connaître sa position exacte dans l'espace et dans le temps : autant d'informations qu'il sera nécessaire d'obtenir
de plus en plus fréquemment avec une grande fiabilité. Dans quelques années, ce sera possible avec le système de
radionavigation par satellite Galileo, initiative lancée par l'Union européenne et l'Agence spatiale européenne (ESA).
Ce système mondial assurera une complémentarité avec le système actuel GPS
(Global Positioning System).
Complémentaire du GPS, Galileo offrira une précision au mètre près sur toute la surface du globe, contre 5 à 10 m
pour le système américain. Il assurera également une meilleure couverture dans les zones à haute latitude
(notamment en Arctique). En combinaison avec le GPS, il pourra fonctionner dans les grands centres urbains peu
dégagés et en environnement contraint.
Le 28 décembre 2005, le satellite Giove-A, qui est le premier des 30 satellites du projet Galileo, a été mis sur une
orbite circulaire par une fusée Soyouz-Frégate.
Données :
Constante de gravitation universelle : G = 6,67.10 11 m 3 .kg 1.s 2 Masse de la Terre : MT = 5,98.10 24 kg.
Rayon de la Terre : RT = 6,37.10 3 km. Altitude du satellite Giove-A : h = 23 260 km.
On notera
S le satellite et T le centre de la Terre.
1. Expliquer le mode de propulsion de la fusée Soyouz-Frégate.
2.
2.1. Dans quel référentiel doit-on se placer afin d'étudier le mouvement du satellite Giove-A ?
2.2. Exprimer vectoriellement la force qui modélise l'action mécanique exercée par la Terre sur ce satellite.
3.
3.1. En appliquant la 2ème loi de Newton, déterminer l'expression vectorielle de l'accélération a
de ce satellite.
3.2. Que peut-on alors en déduire sur son mouvement?
4. Exprimer, puis calculer la vitesse vs de ce satellite autour de la Terre.
5.
5.1. Définir la période de révolution Ts de ce satellite.
5.2. Exprimer puis calculer Ts, en seconde puis en heure.
y
A1
y0 v0
A2
O x

CORRECTION AP 14
EXERCICE 5 :
1. Les caractéristiques du poids P
sont :
Direction : la verticale Sens : vers le bas Valeur : P = m.g = 130 10 = 1,3.10 3 N.
2. Système : le projectile
Référentiel d’étude : référentiel terrestre supposé galiléen
Le système n’est soumis qu’à son poids P
= m. g
La seconde loi de Newton s’écrit : P
= m. a
soit m. g
= m. a
et a
= g
Ainsi :
a
ax = 0
az = – g car dans le repère (O, x, z),
g
gx = 0
gz = – g (voir le schéma)
3. Les coordonnées du vecteur vitesse v
s’obtiennent par intégration des deux équations précédentes car
a = d
v
dt .
v
vx = C1
vz = – g.t + C2 où C1 et C2 sont des constantes.
En tenant compte des conditions initiales
v (t=0)
vx(t=0) = C1
vz(t=0) = C2 =
v0
v0x = v0.cos
v0z = v0.sin donc
C1 = v0.cos
C2 = v0.sin
Le vecteur vitesse est :
v
vx = v0.cos
v0z = –g.t + v0.sin
4. La composante du vecteur vitesse suivant l’axe Ox horizontal est vx = v0.cos , c’est une constante. Ainsi, la
vitesse horizontale est constante donc le mouvement sur l'axe Ox est uniforme.
5. Les coordonnées du vecteur position
OG s’obtiennent par intégration des deux équations obtenues à la
question 3 car
v = d
OG
dt .
OG
x = (v0.cos ).t + C3
z = – 1
2.g.t2 + (v0.sin ).t + C4 où C3 et C4 sont des constantes.
En tenant compte des conditions initiales
OG(t=0)
x(t=0) = C3
z(t=0) = C4 =
OG0
x0 = 0
z0 = H (voir le schéma) donc
C3 = 0
C4 = H
Le vecteur position est :
OG
x = (v0.cos ).t
z = – 1
2.g.t2 + (v0.sin ).t + H
6. L’équation horaire x = (v0.cos ).t fournit t = x
v0.cos .
En injectant ceci dans l’équation horaire suivant z, il vient : z = – 1
2.g.
x
v0.cos
2 + v0.sin .
x
v0.cos + H
soit finalement : z = – 1
2.g
v2
0.cos2.x2 + tan + H
7. Pour un trébuchet donné, H est constant, les seuls paramètres de ce lancer sont v0 et .
8. Lorsque le lancer est horizontal ( = 0), il vient : tan = 0 et cos = 1.
L’équation de la trajectoire devient :z = – 1
2.g
v2
0.cos2.x2 + H
Le point de chute vérifie z = 0 soit 0 = – g
2.v2
0
.x2 + H donc g
2.v2
0
.x2 = H donc x2 = 2.v2
0
g.H et x = v0.2.H
g
9. En utilisant la relation précédente, il vient : v0 = x. g
2.H = 100. 10
2x10 =71 m.s–1.
z
v0
g
H
x
O sol

EXERCICE 6 :
1. La valeur P du poids est donnée par : P = m.g0 = 9,1.10 31 9,81 = 8,9.10 30 N
La valeur F de la force électrostatique est : F = e.E = 1,6.10 19 5 200 = 8,3.10 16 N.
F
P = 8,3.10–16
8,9.10–30 = 9,3.1013 La force électrostatique est environ 10 14 fois plus élevée que celle du poids qui peut donc être négligé.
2. Système : le projectile Référentiel d’étude : référentiel terrestre supposé galiléen
Le système n’est soumis qu’à la force électrostatique F
= e.E
La seconde loi de Newton s’écrit :
Fext = d
p
dt soit
F = m.
a soit :
a =
F
m = – e.
E
m
3.1. La force électrostatique doit être orientée vers le bas pour que l’électron
soit dévié vers le bas.
Comme F
= e. E
, le champ électrique E
est de sens opposé à la force F
d’où le schéma ci-contre.
3.2. Le champ électrostatique est orienté de l’armature chargée positivement vers l’armature chargée
négativement : l’armature A2 est donc l’armature chargée positivement.
4.1. D’après la question 2, le vecteur accélération est :
a =
F
m = - e.
E
m avec
E
Ex = 0
Ey = + E d’après le schéma ci-dessus.
Les coordonnées du vecteur accélération sont donc :
a
ax = 0
ay = - e.E
m
4.2. Les coordonnées du vecteur vitesse v
s’obtiennent par intégration des deux équations précédentes
v
vx = C1
vy = – e.E
m.t + C2 où C1 et C2 sont des constantes.
Condition initiale sur la vitesse :
v (t=0)
C1
C2 =
v0
v0
0 (voir le schéma) donc
C1 = v0
C2 = 0
Ainsi le vecteur vitesse est :
v
vx = v0
vy = – e.E
m.t
Les coordonnées du vecteur position
OG s’obtiennent par intégration des coordonnées de
v .
OG
x = v0.t + C3
y = – 1
2.e.E
m.t2 + C4 où C3 et C4 sont des constantes.
Condition initiale sur la position :
OG(t=0)
C3
C4 =
OG0
0
y0 donc
C3 = v0
C4 = y0
Ainsi le vecteur position est :
OG
x = v0.t
y = – 1
2.e.E
m.t2 + y0
4.3. L’équation horaire x = v0.t fournit t = x
v0.
En reportant ceci dans l’équation horaire suivant y, il vient : y = – 1
2.e.E
m.
x
v0
2 + y0 soit y = – 1
2.e.E
m.v2
0
.x2 + y0
Cette équation est bien de la forme y = A.x 2 + B avec A = – 1
2.e.E
m.v2
0
et B = y0 .
4.4. Comme
a = - e.
E
m (question 2), il vient : a = - e.E
m. On obtient : A = – 1
2.e.E
m.v2
0
= – 1
2.a
v2
0
= – a
2.v2
0
4.5. A = – 1
2.e.E
m.v2
0
= – 1
2 x 1,6.10–19 x 5200
9,1.10–31 x (1,5.107)2 = –2,0 m–1
Remarque : Le résultat doit être exprimé avec une unité ! Pour que l’équation y = A.x 2 + B soit homogène, les termes y et A.x 2 doivent
avoir la même unité, ce qui implique que A doit être exprimé en m 1.
y
A1
y0 v0
A2
O x
F
E

EXERCICE 7 :
1. Les gaz expulsés par la fusée Soyouz-Frégate sont à l’origine de son mouvement : c’est le mode de propulsion par
réaction.
2.1. On doit se placer dans le référentiel géocentrique supposé galiléen.
2.2.
FT/Sat = G.MT.ms
r2.
n avec
n : vecteur unitaire de direction Terre-Satellite et dirigé vers la
Terre où mS est la masse du satellite et « r » est le rayon de l’orbite du satellite avec : r = RT + h.
3.1.
FT/Sat est la seule force qui s’applique au satellite, la 2ème loi de Newton à ce satellite
s’écrit donc
Fext = d
p
dt = ms.
a soit
FJ/Sat = ms.
a soit G.MT.ms
r2.
n= ms.
a
On obtient :
a = G.MT
r2.
n
3.2. Dans le repère de Frenet, l’expression de l’accélération est
a = v2
r.
n + dv
dt.
=
a = G.MT
r2.
n donc dv
dt = 0.
Cela signifie que la vitesse est constante donc que le mouvement circulaire est uniforme.
4. La relation précédente devient selon n
: v2
r = G.MT
r2 v = G.MT
r = G.MT
RT + h = 6,67.10–11 x 5,98.1024
6,37.106 + 23 260.103 = 3,67.103 m.s–1
Remarque : attention à bien exprimer RT et h en mètres (et non en kilomètres) !
5.1. La période de révolution TS du satellite est la durée qu’il lui faut pour accomplir un tour complet sur son orbite.
5.2. v = d
t = 2.r
TS = 2.(RT + h)
TS donc TS = 2.(RT + h)
v = 2.(6,37.106 + 23 260.103)
3,67.103 = 5,07.104 s = 5,07.104
3600 = 14,1 h
v
S
Terre
n
FT/sat
1
/
5
100%