suivi de comportement direct

Département Génie Mécanique Développement –INSA de Lyon
8, rue des Sciences –69621 VILLEURBANNE CEDEX
Didier Rémond
INSA GMD
Modélisation expérimentale et Suivi de
Comportement de Machines
Experimental modelling and Behaviour
Monitoring of Machines
II. Suivi de comportement direct

Didier Rémond p II.2 / 45
Modélisation Expérimentale et Suivi de Comportement de Machines 2015
II. Suivi de comportement direct
Généralités
la grandeur mesurée permet de suivre directement le
comportement
–température sur un palier
–vibrations sur un carter
–niveau d'émission acoustique
–orbite d'un arbre tournant
–analyse de polluants dans un lubrifiant
l'indicateur est généralement global et ne traduit pas
un phénomène particulier
–échauffement = augmentation des pertes par frottement
= usure générale
–difficile de remonter à la cause
–non unicité de la cause
Généralités

Didier Rémond p II.3 / 45
Modélisation Expérimentale et Suivi de Comportement de Machines 2015
II. Suivi de comportement direct
Généralités
le seuil de détection peut être délicat à fixer
le niveau peut varier avec les conditions de
fonctionnement
–niveau en fonction de la charge sur un réducteur
–fréquence d'excitation dépendant de la vitesse de rotation
–réponse amplifiée par une résonance
on peut multiplier le nombre de capteurs de même
type (accéléromètres par exemple)
–augmentation de la complexité des analyses
–cohérence des manifestations enregistrées
Généralités

Didier Rémond p II.4 / 45
Modélisation Expérimentale et Suivi de Comportement de Machines 2015
II. Suivi de comportement direct
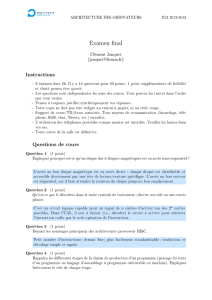
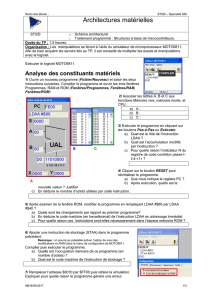
Analyse du niveau vibratoire d'un train
d'engrenages
mesures par accélérométrie sur palier…
… seuil de détection
Généralités Exemple

Didier Rémond p II.5 / 45
Modélisation Expérimentale et Suivi de Comportement de Machines 2015
II. Suivi de comportement direct
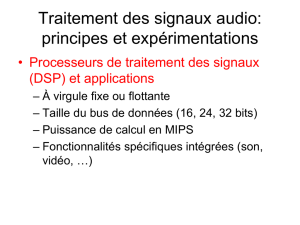
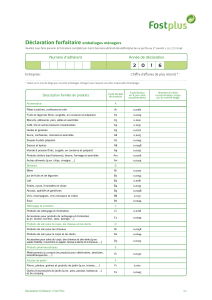
Analyse de l'engrènement et de ses défauts
caractérisation de l'excitation
Défauts d'engrènement caractéristiques
e(t) = q1(t) -k.q2(t)
(en radians)
q1q2
engrenages parfaits
q1(t)= k.q2(t)
déformations des dents
déformations des supports,
erreurs de fabrication,
erreurs de montage, ...
q1(t)= k.q2(t) + e(t)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
1
/
45
100%