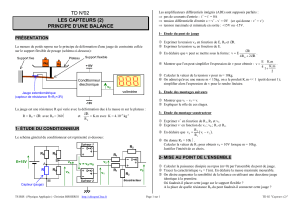
notes de cours

Master RMM : Transport Quantique
L’effet Aharonov-Bohm et le transport adiabatique
David Viennot
21 octobre 2011

2

Table des matières
1 Théorie de jauge en électromagnétisme et cohomologie 5
1.1 Épistémologie de l’électromagnétisme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Rappels sur les équations de Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.1 Parité, pseudovecteurs et pseudoscalaires . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.2 Formulation locale/différentielle vs globale/intégrale . . . . . . . . . . . . . . . . . . . 8
1.2.3 Champs et excitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.4 Les équations de Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2.5 Invariance de jauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3 Formalisme de la géométrie différentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.1 Les formes différentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.2 La différentielle extérieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4 Les différentes théories de jauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4.1 Théorie de jauge de degré 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4.2 Théorie de jauge de degré 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.4.3 Le cas général . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 L’effet Aharonov-Bohm et homotopie 21
2.1 Transport d’une particule dans un champ électromagnétique . . . . . . . . . . . . . . . . . . . 21
2.1.1 Principe d’invariance de jauge de Weyl . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.2 Transport d’une particule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.2 L’effet Aharonov-Bohm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.1 L’effet Aharonov-Bohm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.2 Retour sur l’épistémologie du magnétisme . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 La notion d’homotopie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.1 Le groupe d’homotopie et l’effet Aharonov-Bohm . . . . . . . . . . . . . . . . . . . . . 25
2.3.2 Sur les groupes d’homotopie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3 Le transport adiabatique et holonomie 29
3.1 Contrôle quantique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.1 Problèmes de contrôle quantique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.2 L’approximation adiabatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2 Le transport adiabatique et la phase géométrique . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2.1 Fonction d’onde dans l’approximation adiabatique . . . . . . . . . . . . . . . . . . . . 30
3.2.2 La phase géométrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3 La théorie de jauge adiabatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.1 L’exemple du spin dans un champ magnétique . . . . . . . . . . . . . . . . . . . . . . 31
3.3.2 Cas général . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3

4TABLE DES MATIÈRES

Chapitre 1
Théorie de jauge en électromagnétisme
et cohomologie
1.1 Épistémologie de l’électromagnétisme
La notion de force a mis longtemps à être conceptualisée en physique. Elle était utilisée implicitement dès
l’antiquité (avec par exemple la notion de poids chez Archimède), mais sans être clairement définie. Cette
notion doit sa définition à Isaac Newton, dans PhilosophiæNaturalis Principia Mathematica (Principes ma-
thématiques de la philosophie naturelle) : la force est une action mécanique capable de créer une accélération.
Ainsi les forces sont l’origine de la mise 1en mouvement. Cette notion ne pose pas de problèmes majeurs
pour les forces de contact (réaction de support solide, force de frottement, ...). Deux corps en contact agissent
et réagissent l’un sur l’autre par l’intermédiaire de forces. Mais dans le même ouvrage, Newton introduisit
la loi de gravitation universelle faisant intervenir la force :
~
F1→2=−Gm1m2
r2~u1→2
Suivant cette loi, les corps semblent agir "à distance" l’un sur l’autre. Ainsi, la théorie de la gravitation de
Newton semble non-locale : un objet non-présent en un lieu géographique donné a une influence sur ce qui se
passe en ce lieu. Cette non-localité de l’interprétation de la théorie de la gravitation était un problème majeur
dans la compréhension physique du phénomène. Elle fut même à l’origine d’un profond rejet de sa théorie
à l’époque de la publication des Principia, en particulier de la part de Christian Huygens. La physique de
l’époque était en effet encore influencée par les théories aristotéliciennes considérant l’origine de mouvement
comme un état transitoire permettant aux choses de revenir vers leur “état naturel”, mais surtout par la
philosophie de Renée Descartes et sa conception mécaniste de la nature. Dans cette conception, la matière
est inerte et le mouvement est régi par les lois simples (et locales) des chocs et de la pression. Beaucoup ont
alors considéré la loi de l’attraction universelle comme une résurgence de l’occultisme, ce qui n’est pas tout
à fait faux. En effet, Newton pratiquait en secret l’alchimie, et son concept d’interaction à distance n’est
pas sans rappeler la notion “d’affinité” que l’on trouve en alchimie. Par la suite, l’étude de l’électricité et du
magnétisme, introduisit les autres forces agissant à distance que sont la force de Lorentz (électrique) et la
force de Laplace (magnétique). Une interprétation moins problématique fût proposée par Michael Faraday,
qui introduisit les "lignes de force". L’idée est que les objets chargés électriquement, sont "reliés" par des
"lignes invisibles" qui transmettent la force. On pourrait faire l’analogie avec la tension d’un fil. Lorsqu’on
tire sur un fil attaché à une masse, on agit directement sur le bout du fil (par une force de contact), le bout
du fil agit sur le "petit morceau" de fil qui lui est contigu, ce petit morceau agit sur le petit morceau à côté,
et ainsi de proche en proche, la force est transmise localement jusqu’à la masse. Les lignes de forces sont
sensées agir de façon analogues, en transmettant de proche en proche l’interaction. Cette idée fût bien sûr
renforcée par la visualisation expérimentale de ces lignes (en utilisant de la limaille de fer et un aimant, par
exemple). Les lignes de force donnent une interprétation locale des forces "agissant à distance" mais par
l’intermédiaire d’objets non-locaux (une ligne n’est pas un objet local car n’est pas déterminée en un point
par ce seul point). La solution est de revenir "au découpage" de la ligne en "petits morceaux infiniment
petits" agissant les uns sur les autres de proche en proche. Mathématiquement formulé, ceci introduit de
1. et non directement du mouvement, cf. principe d’inertie de Galilée
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
1
/
33
100%