CI-5 MODÉLISER LES ACTIONS MÉCANIQUES - gondor

CI-5 MODÉLISER LES ACTIONS MÉCANIQUES
PRÉVOIR ET VÉRIFIER LES PERFORMANCES DE SYSTÈMES
SOUMIS À DES ACTIONS MÉCANIQUES STATIQUES.
Objectifs ANALYSER-MODELISER-RESOUDRE-OPTIMISER
A la fin de la séquence,
•B2 : Proposer un modèle de connaissance et de comportement
◦Associer un modèle à une action mécanique
◦Déterminer la relation entre le modèle local et le modèle global
◦Associer à chaque liaison son torseur d’actions mécaniques transmissibles
•C1 : Proposer une démarche de résolution
◦Choisir une méthode pour déterminer la valeur des paramètres conduisant à des positions d’équilibre
•C2 : Procéder à la mise en oeuvre d’une démarche de résolution analytique
◦Déterminer le calcul complet des inconnues de liaison
◦Déterminer la valeur des paramètres conduisant à des positions d’équilibre (par exemple l’arc-boutement)
Table des matières
1 Modélisation d’une action mécanique 2
1.1 Définition ........................................................................................................... 2
1.2 Notiondeforce ........................................................................................................ 2
1.3 Notiondemoment ...................................................................................................... 2
1.4 Torseurd’actionmécanique.................................................................................................. 2
1.5 Casparticuliers ........................................................................................................ 3
2 Actions mécaniques transmissibles par une liaison parfaite 3
2.1 Rappelssurlesliaisonsparfaites ............................................................................................... 3
2.2 Analysedelaliaisonpivot .................................................................................................. 4
2.3 Tableaudesliaisonsusuelles ................................................................................................. 5
2.4 Moyenmnémotechniquederetrouverlestorseursdesliaisonsparfaites........................................................................... 5
2.5 Modélisationplane ...................................................................................................... 5
3 Actions mécaniques particulières 6
3.1 Pesanteur ........................................................................................................... 6
3.2 Pressionhydrostatiqued’unfluidesurunsolide ....................................................................................... 7
4 Lois de Coulomb 7
4.1 LoisdeCoulomb(ouloidufrottement)pouruncontactponctuel.............................................................................. 7
4.2 LoisdeCoulombpouruncontactnonponctuel ....................................................................................... 10
5 Principe Fondamental de la Statique (PFS) 10
5.1 Isolementd’unsolide..................................................................................................... 10
5.2 Actionmécaniqueextérieure/intérieure........................................................................................... 11
5.3 EnoncéduPFS ........................................................................................................ 12
5.4 Théorèmesgénérauxdelastatique.............................................................................................. 12
5.5 Théorèmesdesactionsréciproques.............................................................................................. 13
5.6 Systèmesoumisàl’actionde2glisseurs(forces) ...................................................................................... 13
5.7 Systèmesoumisàl’actionde3glisseurs(forces) ...................................................................................... 13
6 Liaisons équivalentes 15
6.1 Liaisonsenparallèle ..................................................................................................... 15
6.2 Liaisonensérie........................................................................................................ 15
7 Résolution d’un problème de statique 16
7.1 Hypothèses .......................................................................................................... 16
7.2 Algorithmederésolution ................................................................................................... 16
7.3 Résolutiond’unproblèmedestatiqueplan.......................................................................................... 17
7.4 Exempledestatiquegraphique................................................................................................ 17
8 Tableau des liaisons normalisées 18
LYCÉE CARNOT (DIJON) MPSI -PCSI GERMAIN GONDOR

1. MODÉLISATION D’UNE ACTION MÉCANIQUE 2/20
1 Modélisation d’une action mécanique
1.1 Définition
DÉFINITION: Action mécanique
Toute cause susceptible de
•maintenir un corps au repos
•créer un mouvement
•déformer un corps
On distingue deux types d’actions mécaniques :
•les actions mécaniques de contact (liaison de contact entre solides, pression,. . . .)
•les actions mécaniques à distance (champ de pesanteur, force électromagnétique,. . . )
1.2 Notion de force
L’action mécanique est caractérisée par :
sa direction son sens son intensité
Elle possède donc toutes les caractéristiques d’un vecteur. Un action mécanique représentable par un vecteur est appelée
force. Cependant cette notion de force n’est pas suffisante pour décrire les actions mécaniques.
1.3 Notion de moment
Pour définir complètement une action mécanique, il convient de
prendre en compte son point d’implication (P):
Il est donc nécessaire d’introduire la notion de moment au point A
de la force #»
Fappliquée en Pet défini par :
#»
M(A,
#»
FP)=
#»
M(A,
#»
F)=
# »
AP ∧
#»
F
REMARQUE:l’unité d’un moment est le N.m.
La porte se ferme La porte ne se ferme pas
1.4 Torseur d’action mécanique
Puisque #»
M(B,
#»
FP)=
# »
BP ∧
#»
FP=# »
BA +
# »
AP∧
#»
FP=
# »
BA ∧
#»
FP+
# »
AC ∧
#»
FPd’où #»
M(B,
#»
FP)=
#»
M(A,
#»
FP)+
# »
BA ∧
#»
FP
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI

2. ACTIONS MÉCANIQUES TRANSMISSIBLES PAR UNE LIAISON PARFAITE 3/20
Le champ des moments d’une force est donc. . . un champ de moments!! Il est donc représentable par un torseur avec comme
vecteur résultante, la force appliquée #»
FP:F#»
FP→Σ=
M(#»
FP
#»
M(M,
#»
FP))
Dans le cas général d’un système Ssoumis à une force #»
F, le torseur F#»
F→Sde l’action mécanique créée par cette force
s’écrit :
F#»
F→S=
M
#»
R#»
F→S
# »
M(M,
#»
F→S)
=
M
X L
Y M
Z N
B
Lorsqu’il y a plusieurs actions mécaniques, on additionne les torseurs (attention au point où on additionne les torseurs)
F
Pih#»
Fii→Σ=X
i
M
#»
R#»
Fi→Σ
# »
M(M,
#»
Fi→Σ)
=
M
X
ih#»
R#»
Fi→Σi
X
ih# »
M(M,
#»
Fi→Σ)i
1.5 Cas particuliers
1.5.1 Torseur couple
Un torseur couple est de la forme F#»
F→S=
M
#»
0
# »
M(M,
#»
F→S)
avec # »
M(M,
#»
F→S),
#»
0.
1.5.2 Torseur glisseur
Un torseur glisseur est de la forme F#»
F→S=
A(#»
R#»
F→S
#»
0)avec ∀M,
# »
M(M,
#»
F→S).
#»
R#»
F→S=0.
L’action mécanique d’une force #»
Fappliquée en un point Aest modélisable par un glisseur.
DÉMONSTRATION :
# »
M(M,
#»
F→S).
#»
R#»
F→S=h
# »
M(A,
#»
F→S)+
# »
MA ∧
#»
R#»
F→Si.
#»
R#»
F→S=h# »
MA ∧
#»
R#»
F→Si.
#»
R#»
F→S=0
2 Actions mécaniques transmissibles par une liaison parfaite
2.1 Rappels sur les liaisons parfaites
Ces liaisons parfaites ont les caractéristiques suivantes :
•Les pièces mécaniques sont des solides indéformables.
•Les surfaces sont géométriquement parfaites.
•Les jeux sont nuls
•Le contact est sans frottement ni adhérence.
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI

2. ACTIONS MÉCANIQUES TRANSMISSIBLES PAR UNE LIAISON PARFAITE 4/20
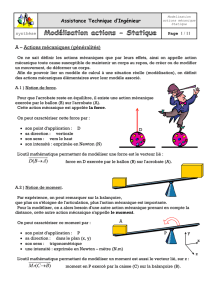
2.2 Analyse de la liaison pivot
Une liaison pivot d’axe (O,#»
x)permet un mouvement de rotation, autour de cet axe, entre deux solides Siet Sk. Sa réalisa-
tion se fait essentiellement par un couple de surfaces cylindriques de révolution, avec éventuellement des paliers lisses ou
des roulements, et des arrêts axiaux.
Projection orthogonale
#»
z
#»
x
Sk
Si
Perspective
Sa schématisation (norme NF E 04-015) est donnée
ci-contre.
En tout point de l’axe (O,#»
x), donc en particulier au point O, les éléments
de réduction du torseur cinématique associé s’écrivent : V
Sk/Si=
O
#»
Ω(k/i)
ωx
0
0
#»
V(O,Sk/Si)
0
0
0
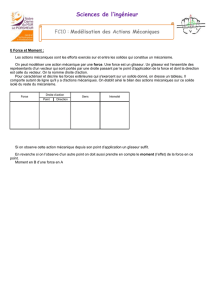
Considérer une liaison pivot d’axe (O,#»
x)entre deux solides revient à considérer, d’un point de vue mathématique, les
surfaces de liaison comme des surfaces de révolution non cylindriques d’axe (O,#»
x):
La densité surfacique d
#»
Fl(Si7→ Sk)rencontre l’axe (O,#»
x)en H, donc son moment en Oa une projection nulle sur l’axe
(O,#»
x). En effet
# »
M(O,Si→Sk).
#»
X=h# »
OIl∧d
#»
Fl(Si7→ Sk)i.
#»
X
=h# »
OH ∧d
#»
Fl(Si7→ Sk)i.
#»
X
| {z }
0
+h# »
HIl∧d
#»
Fl(Si7→ Sk)i
| {z }
#»
0
.
#»
X=0
d’après les conditions de nullité du produit vectoriel et du produit mixte. Par conséquent le torseur d’inter-efforts transmis-
sibles par la liaison pivot d’axe (O,
#»
X)entre les deux solides Siet Sks’écrit :
F
Sk→Si=
O
#»
RSi→Sk
X
Y
Z
# »
M(O,Sk→Si)
0
M
N
La forme de ce torseur est conservée en tout point de l’axe (O,
#»
X).
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI

2. ACTIONS MÉCANIQUES TRANSMISSIBLES PAR UNE LIAISON PARFAITE 5/20
2.3 Tableau des liaisons usuelles
Une étude semblable peut être faite pour toutes les liaisons usuelles. Le tableau des liaisons et de leur torseur d’action trans-
missible est porté en dernières pages.
2.4 Moyen mnémotechnique de retrouver les torseurs des liaisons parfaites
Nous verrons dans le programme de deuxième année que la liaison étant parfaite, la puissance des efforts intérieurs à la
liaison sont nuls. Le comoment du torseur cinématique V
S2/S1et du torseur des actions mécaniques F
S2→S1est donc nul.
#»
RS2→S1.
#»
V(A,S2/S1)+
#»
Ω(S2/S1).
# »
M(A,S2→S1)=0
X10u10 +Y10v10 +Z10w10 +L10 p10 +M10q10 +N10r10 =0
On peut en déduire que le produit scalaire du vecteur résultante des actions mécaniques et du vecteur vitesse entre les so-
lides est nul. Il en est de même pour le produit scalaire du moment des actions mécaniques et du vecteur rotation entre les
solides. Ainsi, il convient de remplacer de façon duale les zéros du torseur cinématique pour obtenir le torseur des actions
mécaniques et inversement. Attention toute fois à ne pas se tromper de colonne et dans le cas de la liaison hélicoïdale!
Par exemple pour la liaison pivot :
V
S2/S1=
A
ω21 0
0 0
0 0
R
⇒
A
X0
Y M
Z N
R
=F
S2→S1
•X,Yet Zsont les composantes de #»
RS2→S1dans le repère R.
•L,Met Nsont les composantes de # »
M(A,S2→S1)dans le repère R, avec L=0.
Physiquement, cela se comprend car si on applique une force ou un moment selon une certaine direction à une des pièces,
cette force (ou ce moment) ne peut pas être transmise à l’autre pièce si il y a un mouvement possible entre les deux dans
cette même direction.
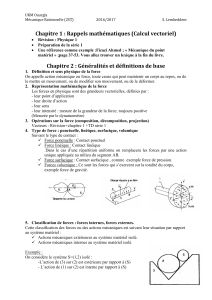
2.5 Modélisation plane
ddl Nom de la liaison Schématisation Caractéristique
géométrique
Torseur cinématique
V
1/0=
X(#»
Ω(S1/S0)
#»
V(X,S1/S0))
Torseur des
actions mécaniques
transmissibles
0 ddl
0 tr
0 rt
Encastrement ∀M∈(ε)
M
−0
−0
0−
R0M
X10 −
Y10 −
−N10
R0
1 ddl
1 tr
0 rt
Glissière 1 direction #»
x
∀M∈(ε)M
−u10
−0
0−
R0M
0−
Y10 −
−N10
R0
1 ddl
0 tr
1 rt
Pivot 1 axe (A,#»
z)
∀M∈(A,#»
z)M
−0
−0
r10 −
R0M
X10 −
Y10 −
−0
R0
2 ddl
1 tr
1 rt
Ponctuelle plane
Normal au plan
#»
y, point de
contact AA
−u10
−0
r10 −
R0A
0−
Y10 −
−0
R0
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%