Mécanique du vol - Aéro

1
MECANIQUE DU VOL
1 Equilibre de l’avion autour du centre de gravité
(Avion de conception classique)
11 Stabilité en tangage
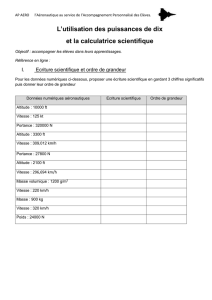
Le contrôle longitudinal de l’avion consiste à contrôler ses évolutions autour du centre de gravité
CG. Le centre de gravité n’étant pas confondu avec le centre de poussée CP, il apparaît un moment
à piquer M1. Pour que l’avion reste en équilibre, il faut contre-balancer avec un moment M2 tel que :
M1 = M2
Avec M1 = Fz * Y et M2 = Fz’ * X
Cet équilibre est réalisé par le plan Horizontal arrière qui est initialement calé à une incidence
négative, qui donne lieu à une portance négative appelée déportance.
A puissance moteur constante toute variation de l’angle d’incidence α
αα
α’, conduit à une variation de
déportance, donc à une variation du moment M2. Ceci se traduit par un mouvement de l’avion
autour du centre de gravité.
Représentation simplifiée :
La portance Fz est la somme des portances de l’avion, elle a son point d’application CP
confondu avec le centre de gravité CG.

2
L’avion complet à un foyer (point pour lequel le moment de tangage est constant quelle que soit
l’incidence).
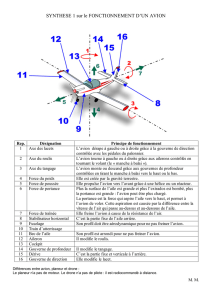
Définition du foyer :
C’est le point d’application des variations de portance
Variation de portance : Cas d’une augmentation de portance
L’avion en configuration initiale fait l’objet d’une augmentation de portance (sous l’effet par exemple
d’une rafale). Par extrapolation, les variations de portance (∆Fz) s’appliquent en son foyer.
L’augmentation de portance associée à la portance initiale, donne lieu à une nouvelle portance
Fz. Le recul de CP fait donc apparaître un moment à piquer. L’avion évolue autour de son centre de
gravité jusqu'à l’annulation de ce moment à piquer.
Moment à piquer :
∆
∆∆
∆Fz . D = Fz . d
Auto stabilisation : (augmentation de portance modérée)
• Augmentation de portance
Sous l’effet du moment à piquer, l’avion bascule vers l’avant, l’incidence diminue ainsi que la
portance. L’incidence ayant diminué, la portance retrouve sa valeur initiale et l’avion est à nouveau
en équilibre.
• Diminution de portance
Sous l’effet de la diminution de portance, il apparaît un moment à cabrer. L’incidence Augmente,
la portance augmente donc aussi pour retrouver sa valeur initiale et l’avion son équilibre.
L’avion complet est équivalent à une aile à double courbure.

BIA Mécanique du vol J.C. IRZA
3
Stabilisation commandée :
Si l’augmentation de portance dépasse les possibilités d’auto stabilité de l’avion, le pilote doit
apporter le complément nécessaire à la stabilisation en commandant une nouvelle incidence de la
gouverne de profondeur.
Qualité de vol :
La position du centre de gravité est dépendante de la répartition des charges embarquées
(passagers, bagages, carburant…).
L’avion est dit :
Centré arrière si le centre de gravité est proche du centre de poussée.
Le rapport X/Y augmente, l’efficacité de la gouverne de profondeur augmente, l’avion est
maniable mais instable.
Centré avant le centre de gravité est éloigné du centre de poussée.
Le rapport X/Y diminue, l’efficacité de la gouverne de profondeur diminue, l’avion est stable
mais peu maniable.
12 Le devis de masse et centrage :
Cette opération consiste à déterminer la masse de l’avion et la position du centre de gravité de
l’avion chargé (Bras de levier L), afin de s’assurer que les gouvernes de profondeur permettront
de contrôler les évolutions dans le domaine défini par le constructeur.
La référence est choisie arbitrairement par le constructeur.
Exemple : DR400
Référence: Cloison pare-feu
Bras de levier: L en mètre
DEVIS MASSE DR400
Masse (kg) Bras de levier
Moment
Masse vide
577
0,369
212,913
Pilote
75
0,41
30,75
Passager avant
70
0,41
28,7
Passager arrière
60
1,19
71,4
Bagages
5
1,9
9,5
Masse carburant
77
1,12
86,24
Masse décollage
864
0,509
439,503

4
13 Stabilité en roulis et lacet
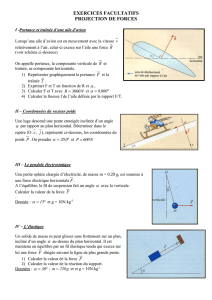
131 Effet de roulis induit
On crée un mouvement de lacet (axe z) avec la gouverne de direction
La vitesse de l’aile gauche augmente La portance de l’aile gauche augmente l’aile gauche monte
La vitesse de l’aile droite diminue La portance de l’aile droite diminue l’aile droite descend
Le mouvement de lacet génère du roulis induit
Critère de stabilité :
L’aile qui monte doit redescendre (par exemple par effet de dièdre)
La stabilité latérale est favorisée par :
• la forme et la surface de la dérive
• le dièdre positif de l’aile
• l’aile haute
• l’aile en flèche
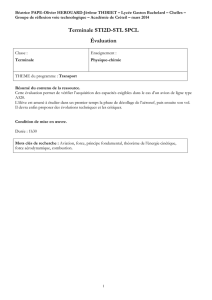
132 Effet de lacet inverse
On crée un mouvement de roulis avec les ailerons
Gouverne de
direction
Mouvement
de lacet
Vitesse aile droite
diminue
Vitesse aile gauche
augmente
Axe de roulis
Axe de tangage
Axe de lacet

5
Inclinaison commandée :
La portance de l’aile gauche augmente (aileron baissé) l’aile monte
La portance de l’aile droite diminue (aileron levé) l’aile descend
Lacet inverse :
La traînée de l’aileron baissé est plus importante que celle de l’aileron levé
Apparition d’un couple engendré par la différence des traînées
Correction :
-
Correction par construction
Braquage différentiel des ailerons, l’angle de braquage aileron baissé est plus faible que celui
de l’aileron levé.
-
Correction commandée par le pilote
Braquage de la gouverne de direction, pendant un virage à droite le pilote actionne le palonnier
droit, pendant un virage à gauche le pilote actionne le palonnier gauche.
Aileron levé
Aileron baissé
Augmentation
de portance
Diminution de
portance
Traînée plus
importante
Axe de lacet
Axe de
tangage
Axe de roulis
Mouvement
de roulis
Lacet
inverse
Pied à droite
Braquage de la gouverne de direction
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%