Version pdf (188 Ko)

Notes de cours
L1 — MATH120
Herv´
e Le Dret
18 octobre 2004

40

Chapitre 3
Vecteurs dans Rm
Dans ce chapitre, nous allons nous familiariser avec la notion de vecteur du
point de vue alg´
ebrique. Nous reviendrons le moment venu sur le point de vue
g´
eom´
etrique
3.1 D´
efinition et op´
erations sur les vecteurs
D´
efinition 17 Soit m ≥1un entier. Un vecteur de Rmest une matrice `
a m lignes
et 1colonne. Un scalaire est un nombre r´
eel (par opposition `
a un vecteur).
On parle aussi de vecteur-colonne. On va ´
egalement employer une notation pro-
visoire avec des petites fl`
eches, que l’on abandonnera d`
es que l’on aura acquis les
notions de base qui suivent. Ainsi
~u=3
−1, ~v=0,2
√5
sont des vecteurs de R2et
~w=
1
2
3
4
est un vecteur de R4.
Comme un vecteur n’a qu’une seule colonne, il est inutile de conserver la
notation `
a double indice des matrices : un seul indice suffit. La r`
egle d’´
egalit´
e
entre matrices s’applique bien sˆ
ur au cas particulier des vecteurs. Ainsi
si~u=u1
u2,~v=v1
v2,alors~u=~vsi et seulement si u1=v1et u2=v2.
41

42 CHAPITRE 3. Vecteurs dans Rm
En d’autres termes, les lignes d’un vecteur sont ordonn´
ees dans l’ordre de leur
indice. Un vecteur g´
en´
erique de Rms’´
ecrit normalement
~u=
u1
u2
.
.
.
um
.
Cette notation naturelle en colonne a le d´
esavantage de gaspiller l’espace sur une
page ´
ecrite quand elle utilis´
ee comme ici de fac¸on isol´
ee. C’est pourquoi on utilise
occasionnellement une notation en ligne
~u= (u1,u2,...,um)
pour d´
esigner le mˆ
eme objet. C’est en fait la notation d’un m-uplet de scalaires et
il faut ´
eviter de la confondre avec la notation
u1u2··· um
qui d´
esigne une matrice `
a 1 ligne et mcolonnes (aussi appel´
ee vecteur-ligne). Ce
n’est pas du tout la mˆ
eme chose!
Nous allons maintenant introduire les deux op´
erations fondamentales sur les
vecteurs.
D´
efinition 18 On d´
efinit sur Rmune op´
eration interne appel´
ee addition par
∀~u=
u1
u2
.
.
.
um
∈Rm,∀~v=
v1
v2
.
.
.
vm
∈Rm, ~u+~v=
u1+v1
u2+v2
.
.
.
um+vm
∈Rm
et une op´
eration externe appel´
ee multiplication par un scalaire par
∀~u=
u1
u2
.
.
.
um
∈Rm,∀λ∈R,λ~u=
λu1
λu2
.
.
.
λum
∈Rm.
Ces deux op´
erations sont donc d´
efinies ligne par ligne.

3.2. Interpr´
etation g´
eom´
etrique dans le plan et dans l’espace 43
Exemple 8 On a
1
−2+2
5=1+2
−2+5=3
3,21
−2=2×1
2×(−2)=2
−4,etc.
On peut combiner ces op´
erations. Ainsi, si~u=1
−2et~v=2
5alors
2~u+(−3)~v=2×1
2×(−2)+(−3)×2
(−3)×5=2
−4+−6
−15=2−6
−4−15=−4
−19,
et ainsi de suite.
3.2 Interpr´
etation g´
eom´
etrique dans le plan et dans
l’espace
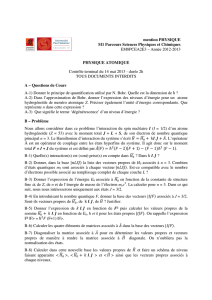
On sait que la donn´
ee d’une origine Oet de deux axes de coordonn´
ees Ox,Oy
munis d’une unit´
e de longueur dans le plan permet de rep´
erer tout point de ce plan
par ses deux coordonn´
ees, un couple de nombre r´
eels. Les vecteurs de R2´
etant
aussi d´
efinis par un couple de nombre r´
eels, on peut se servir de cette correspon-
dance pour repr´
esenter g´
eom´
etriquement les vecteurs de R2. Plus pr´
ecis´
ement, un
vecteur ~u= (u1,u2)de R2sera repr´
esent´
e par le segment orient´
e d’origine Oet
d’extr´
emit´
e le point de coordonn´
ees (u1,u2)dans le rep`
ere cart´
esien choisi. On
le dessine traditionnellement `
a l’aide d’une fl`
eche. De cette fac¸on, les vecteurs
— concept alg´
ebrique — admettent une repr´
esentation g´
eom´
etrique extrˆ
emement
utile pour comprendre et avoir l’intuition de comment ils fonctionnent. Par ailleurs,
cette correspondance ouvre la voie `
a un champ d’application de l’alg`
ebre lin´
eaire
`
a la g´
eom´
etrie plane (et dans l’espace), mˆ
eme si nous ne privil´
egierons pas ce
point de vue, n´
eanmoins tr`
es important.
Oy
u1
u1
u2 2
u
u=
O OOx
Oy
O
x
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%