amplificateurs mli

TN34-1
AMPLIFICATEURS MLI
(MLI :
modulation de largeur d'impulsions)
Par Bill Colton
R. S. Boreham Co. Commerce, CA
Une vaste gamme d’appareils à vitesse variable sont
utilisés dans l’industrie afin d’assurer un meilleur contrôle
des procédés, une productivité améliorée et des frais
d’entretien moindres. Parmi ceux-ci, on retrouve les
amplificateurs à modulation de largeur d’impulsions (MLI) qui
comptent aujourd’hui parmi les plus populaires pour leur bas
prix, l’abondance des pièces de rechange et la faible
puissance nécessaire à leur fonctionnement. Ils sont
également très polyvalents. Par la conversion des
fréquences et tensions fixes AC (simples ou triphasées), en
sortie variable CC pour les moteurs à courant continu
(typiquement les servomoteurs) et CA pour les moteurs à
courant alternatif (induction et sans balais), les MLI
permettent de régler le couple et la vitesse du moteur.
Cet article propose de décrire les principaux composants
des MLI ainsi que les différences entre les divers types de
commandes qui utilisent cette technologie. Nous traiterons
également des ajustements que l’on retrouve sur les
contrôles actuels, en plus des avantages propres aux
onduleurs, aux contrôles vectoriels et aux contrôles sans
encodeur. Les amplificateurs MLI sont aussi connus sous
les appellations suivantes:
• Servo-amplificateur
• Onduleur
• VFD (variable-frequency drive) : contrôleur à
fréquence variable
• Contrôle sans encodeur
• Contrôle vectoriel
• ASD (adjustable-speed drive) : contrôleur à vitesse
réglable
• VSD (variable-speed drive) : contrôleur à vitesse
variable
• Contrôle
Toutefois, même si tous ces appareils sont considérés
comme des amplificateurs MLI, plusieurs peuvent aussi être
associés à d’autres technologies telles que les contrôles SCR
ou les systèmes de poulies à inclinaison variable.
COMPOSANTS
Les amplificateurs MLI comprennent généralement trois
composants, soit la section du convertisseur, la section de
commande ou logique et la section de sortie.
SECTION DU CONVERTISSEUR
La section du convertisseur est la partie du contrôle où
l’alimentation CA est convertie en CC. Il existe quatre
méthodes utilisées pour y parvenir et chacune d’elles
présente des caractéristiques particulières.
Pont de diodes. L’approche la plus répandue consiste à
utiliser un pont de diodes. Il s’agit d’une série de 4 ou de 6
diodes, soit 4 pour une entrée monophasée ou 6 dans le cas
d’une entrée triphasée. Les diodes permettent le passage
de la moitié du bas de l’onde sinusoïdale ou de celle du
haut, selon le mode d’alimentation. De cette façon, on
sépare l’alimentation en « moitié du haut » et en « moitié du
bas », ce qui donne effectivement du courant CC.
Le niveau de courant CC est égal à la racine carrée de 2
(1,414) multipliée par la tension à l’entrée. Le bus pour une
entrée de 460V CA d’un pont de diodes est donc de :
1,414 x 460 = 650V CC
Cette tension comporte des fluctuations (harmoniques). Il
y a donc habituellement une batterie de condensateurs qui
atténue ces fluctuations. Lorsqu’on ouvre le disjoncteur,
l’énergie emmagasinée dans le bus peut s’avérer fatale.
Il faut donc faire preuve d’une grande prudence au
moment de travailler sur ces contrôles. Le bus d’un
contrôle certifié UL descendra à (ou en dessous de) 50V CC
en moins d’une minute si on coupe l’alimentation. Toujours
mesurer le bus lorsqu’on travaille à l’intérieur du contrôle.
Un pont de diodes modifié. Une méthode pour aider à
minimiser les harmoniques consiste à ajouter un
transformateur isolant avec un primaire delta et un
secondaire delta et Wye. La sortie du secondaire delta est
dirigée vers l’un des ponts de diodes, et celle du secondaire
Wye vers un autre pont de diodes alimentant le même bus. Ceci
crée un déphasage de la tension, de sorte que les courants
harmoniques sont reproduits dans le primaire à différents
points dans le temps. Les harmoniques sont adoucies dans
le système de distribution de puissance tout autant que dans
le bus de l’amplificateur. Il y a cependant des frais
supplémentaires associés à cette technique.
Système de contrôle de vitesse sur les moteurs CC.
Une autre technique efficace pour la conversion de la
puissance CA en CC utilise un contrôle CC à 4 quadrants.
Deux redresseurs commandés au silicium (SCR en anglais :
silicon-controlled rectifier) par phase à l’entrée et deux autres
par phase à la sortie (12 SCR pour un système triphasé)
peuvent accomplir la tâche. Un SCR peut convertir le courant
alternatif en continu au taux de 1,08 fois la tension RMS
d’entrée. Toutefois, sur un système de distribution de
puissance de 460V, le bus sera 460V CA x 1,08 = 500V CC.
La tension résultante n’est pas aussi élevée que celle du
pont de diodes pour la même puissance de sortie (volts x
ampères). Le moteur drainera alors plus de courant pour

Amplificateurs MLI Fiche technique no 34
TN34-2
produire ainsi une plus grande quantité de chaleur et
nécessiter des transistors plus volumineux dans le
contrôle. L’un des avantages de cette méthode réside dans le
fait que les SCR supplémentaires dans le contrôle peuvent
retourner une partie de l’énergie (régénération) dans le circuit
afin d’alimenter d’autres composants tels que des palans, des
ascenseurs, des dynamomètres et des supports à détendeurs.
Transistors en amont. Une autre méthode consiste à
utiliser 6 transistors qui s’allument et s’éteignent au moment
où la puissance CA arrive dans le contrôle. Une détection
des phases est nécessaire afin de s’assurer que les
transistors soient en service au bon moment, mais avec
l’utilisation d’un réacteur suralimenté approprié, un bus
constant à 750V CC se révèle possible.
La logique qui permet de retourner cette énergie vers le
circuit réside dans un algorithme vectoriel. Ce qui signifie que
la partie en amont (section du convertisseur) de
l’amplificateur se compose effectivement d’un contrôle
vectoriel. Quoique cette approche puisse être coûteuse, elle
présente plusieurs avantages : facteur de puissance (1,0), très
faibles harmoniques en circuit et contrôle régénératif. Il s’agit
d’une excellente méthode pour des palans, des ascenseurs,
des dynamomètres et des supports à détendeurs.
Informations supplémentaires sur la section du
convertisseur
Puissance simple phase. Il est souvent possible de
faire fonctionner un contrôle triphasé sur une puissance
à simple phase. La plupart des fabricants vont
recommander que la tension continue de sortie soit
ramenée entre 20 et 50 % de celle qui figure aux
spécifications du contrôle (particulièrement dans le cas où les
puissances motrices sont élevées). La théorie se divise en
trois volets :
1. Le pont de diodes, la batterie de condensateurs et la
puissance d’alimentation ne sont pas capables de fournir
au bus suffisamment de tension électrique continue pour
obtenir un courant de sortie triphasé pour le moteur.
2. Puisque le courant CA voyage à seulement
120 cycles/seconde (60 Hz x 2 x 1 ph) au lieu de
360 cycles/seconde (60 Hz x 2 x 3 ph), il y a beaucoup
plus de fluctuations de courant dans le bus. Tirer le
maximum de courant de sortie va probablement affaiblir la
batterie de condensateurs au point de la faire exploser.
3. Avec des fluctuations plus grandes sur la batterie de
condensateurs, il devient plus difficile de contrôler le
courant dans le moteur et à l’intérieur de l’amplificateur.
La majorité des fabricants classent leurs contrôles selon une
large gamme de voltages. Soyez prudents lors de l’application
de ces tensions au-delà de ces limites. Si le voltage actuel est
plus bas que la valeur prescrite (par exemple, 208V CA au
lieu de 230V CA), le contrôle continuera de fonctionner mais
ne laissera plus passer aucun courant. Ce qui signifie
également qu’un contrôle plus gros sera nécessaire pour
obtenir la même puissance de sortie. Pourquoi? La
puissance est égale à la tension en volts multipliée par
l’ampérage. Si le voltage descend et que l’ampérage ne
peut pas être augmenté, le contrôle est donc sous
dimensionné.
Ratées des SCR. Lors de l’utilisation de SCR en amont,
faites attention si certaines harmoniques sont présentes.
Les harmoniques peuvent causer des ratées dans les SCR à
cause de multiples retours à zéro. Même si un réacteur peut
aider à « nettoyer » l’énergie, ce n’est pas toujours la bonne
solution. Un réacteur ajoute de l’impédance au système.
Dès qu’un SCR subit une impédance d’environ 8 % ou plus,
le courant se sépare suffisamment de la tension pour causer
des ratées dans le SCR.
Sauts de tension. Les contrôles en amont des SCR et des
MLI peuvent modifier leur influence lorsque des voltages
élevés ou faibles sont présents (peuvent être arrêtés). Un
pont de diodes ne fait que convertir. Avec une très faible
puissance, des dommages peuvent affecter une résistance à
démarrage doux. À haute puissance, un transistor ou une
résistance régénérative peuvent être endommagés, de
même que le pont ou la batterie de condensateurs. Afin
d’assurer une meilleure protection, installez un appareil de
surveillance de tension à même le contacteur qui alimente
l’amplificateur.
Section du convertisseur – Conclusion
La partie en amont du contrôle convertit une
puissance CA simple ou triphasée en puissance CC par
l’utilisation de SCR, de transistors ou de diodes, qui sont
des composantes susceptibles d’encourir des dommages à
la suite des interruptions de tension. Pour cette raison, il est
généralement conseillé d’ajouter un réacteur (appelé aussi
bobine d’arrêt ou solénoïde) devant le contrôle,
particulièrement lorsque la puissance n’est pas « propre »
et que l’application est critique. Selon l’expérience acquise,
la plupart des fabricants incluent d’emblée un réacteur
d’entrée pour tous leurs panneaux qui comprennent des
contrôles.
Les quatre techniques de conversion décrites plus haut
sont toujours utilisées aujourd’hui. Chacune comporte ses
propres avantages. Les décideurs doivent donc savoir que
différentes techniques peuvent être utilisées pour accomplir
une même tâche et que des résultats, une fiabilité et des
performances légèrement différents sont à prévoir.
SECTION DU BUS DC
Le bus DC transporte l’énergie. Sur les MLI actuellement
disponibles sur le marché, les valeurs des bus sont
constamment réévaluées et des décisions sont prises pour
les bus dont la valeur se situe à l’extérieur des limites
prescrites. La majorité des contrôles procurent un lissage des
fluctuations qui va de modéré à important, de façon à
conserver l’intégrité des composantes.
La plupart de ces amplificateurs utilisent une batterie de
condensateurs qui aide à adoucir les fluctuations de courant
dans le bus. Il s’agit d’une technique fiable et à faible coût.
Cependant, les condensateurs sont sujets à un
« désassemblage » rapide lorsque soumis à des tensions ou
des courants élevés, ou à de la surchauffe. Il existe plusieurs
méthodes pour maintenir ces contraintes à l’intérieur des
limites acceptables.
Recharge en démarrage doux (soft-start). La plupart
des plus petits contrôleurs utilisent une résistance pour
démarrage doux. Ce circuit passe par une résistance située
en amont de la batterie de condensateurs, pour ensuite
atteindre le bus. Ceci minimise les pointes de courant dans
les condensateurs. Dès que la tension dans le bus dépasse
les limites minimales, un contacteur se ferme, contournant la
résistance et empêchant ainsi qu’elle surchauffe.

Fiche technique no 34 Amplificateurs MLI
TN34-3
Une autre méthode consiste à utiliser un SCR afin
d’augmenter la tension dans le bus. Une fois que la tension
dans le bus grimpe au-dessus des limites minimales, le SCR
s’éteint et la puissance est dirigée vers un pont de diodes.
Bobine d’arrêt du bus CC. Par cette méthode, une bobine
dans le bus réduit les fluctuations et les pointes de courant. On
aide également l’amplificateur à surmonter les pointes de
tension lorsqu’il est alimenté par une source à faible
impédance. Cette bobine augmente toutefois les coûts, le
poids et l’espace occupé.
Certains contrôles proposent une bobine d’arrêt en option
pouvant être ajoutée au besoin. Utilisez les bobines avec
précaution puisque qu’elles diminuent la tension avec le
courant et réduisent ainsi la puissance de sortie.
Le bus commence à la sortie de la section convertisseur,
conduit la puissance vers la batterie de condensateurs et la
bobine d’arrêt (si applicable) et se termine à la section de
sortie.
SECTION DE SORTIE
La section de sortie comporte des transistors qui
s’allument et s’éteignent de façon intermittente, générant
ainsi des impulsions DC vers l’enroulement.
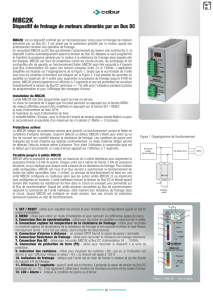
MLI DC. La plupart des servocommandes d’aujourd’hui
comportent des sorties en MLI. Pour les moteurs à aimant
permanent, la sortie consiste en 4 transistors agencés comme
le montre la figure 2.
En plaçant le transistor du haut en position A1 et celui
du bas en position A2, on permet au moteur de tourner
dans une direction. Si on inverse les positions des
transistors, le moteur tournera dans l’autre direction.
La vitesse d’un moteur DC MLI est directement
proportionnelle à la tension. Plus longues et denses seront les
impulsions, plus élevée sera la tension moyenne dans le
moteur. Si on peut contrôler les phases « marche » et
« arrêt », on peut contrôler la tension. Si on peut contrôler
la tension, on peut contrôler la vitesse. Les polarités de
positions A1 et A2 peuvent aussi être modifiées. Il est donc
possible de contrôler le sens de rotation du moteur.
Si l’inductance du moteur est trop faible, le courant qui
circule dans le transistor sera trop élevé. Dans un cas
semblable, utilisez une bobine de sortie ou augmentez le
courant prescrit de l’amplificateur. Aussi, assurez-vous que
le taux d’augmentation du voltage ne soit pas tel qu’il fasse
griller le commutateur.
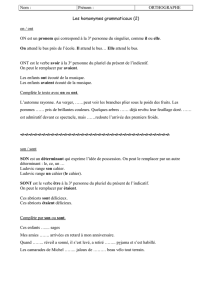
MLI CA. La figure 4 illustre un MLI CA, utilisé dans bon
nombre de technologies :
• Onduleur
• Contrôleur
• Contrôleur sans encodage
• Contrôleur sans balais
Les transistors positifs et négatifs de chaque branche du
circuit peuvent être mis en marche afin que la fréquence
puisse être modifiée. Puisque la fréquence peut être
changée, la vitesse peut être ajustée. La figure 5 montre le
signal qui en résulte. Tel qu’illustré, la fréquence est
contrôlée en modifiant l’instant « en marche » des transistors
de haut en bas sur chaque branche. Évidemment, les
phases doivent conserver un déphasage de 120 degrés
entre elles. Modifier l’instant « en marche » versus l’instant
« arrêt » modifie également la tension à cette fréquence,
rendant possible la maximisation du rapport courant/charge.
Une augmentation de la tension électrique en fréquence
augmente le couple du moteur, le courant et la chaleur
jusqu’à atteindre une saturation électrique. Une diminution
de la tension électrique en fréquence diminue le couple du

Amplificateurs MLI Fiche technique no 34
TN34-4
moteur, le courant et la chaleur (utile pour des charges à
couple variable). La tension et les niveaux de fréquence sont
parfois contrôlés par des logiciels ou encore par micro logiciel
(firmware).
Le courant peut circuler à travers un transistor dans les deux
directions. Au fur et à mesure que le moteur se « régénère »,
l’énergie retourne de la sortie vers le bus.
La plupart des transistors utilisés aujourd’hui possèdent
des mécanismes d’autoprotection contre la surchauffe et
le courant excessif. Si la chaleur ou le courant dépasse la
limite prescrite, un module « intelligent » (IPM ou Intelligent
Power Module) bloque le transistor et signale au contrôleur
du microprocesseur que les composantes de sortie se
sont arrêtées d’elles-mêmes par mesure de protection.
Les IPM sont plus répandus dans les plus gros (et plus
dispendieux) modules.
Une section de sortie triphasée (six transistors) se retrouve
sous la forme d’un seul module intégré (généralement appelé
« six pack »).
La plupart des plus gros transistors fonctionnent près des
puissances d’entrée et de sortie à haute tension, ce qui
présente le danger que du bruit s’infiltre dans leurs circuits
d’allumage.
Mettre en marche les transistors du haut et du bas en
même temps sur le même embranchement pourrait
provoquer un court-circuit dans le bus, ce qui détruirait la
batterie de condensateurs et également plusieurs autres
composantes en plus de présenter des dangers d’explosion.
À cause de ce potentiel de danger, de nombreuses
composantes sont dotées de fibres optiques plutôt que de
câbles.
Circuit régénératif. Il existe plusieurs façons de traiter
l’énergie régénérative.
CC élevé. Lorsque le moteur se régénère, la tension
dans le bus augmente. Puisque ce niveau est surveillé,
lorsqu’il excède la limite de contrôle, le transistor est bloqué et
le contrôle signale un faute telle que la surtension, un CC
élevé, un bus élevé, une surtension dans le bus ou une alerte
semblable. La terminologie demeure le choix du fabricant.
Modification du niveau de fréquence du bus. Lorsque le
moteur se régénère et que le bus atteint un seuil limite, le
contrôle augmente la fréquence libre du moteur, ce qui
diminue celle du bus. Dans le cas où le bus atteint la limite
absolue, le contrôle signalera une erreur de CC élevé. Si un
contrôle serré de la vitesse est requis, cette option peut ne
pas être envisageable.
Système de freinage régénératif. Il est installé
habituellement sur les contrôles plus petits et proposé en
option sur les plus gros contrôles ainsi que sur plusieurs
minis contrôles. Comme le montre la figure 6, le circuit
comporte deux composantes.
Lorsque le bus atteint sa limite interne, le transistor
régénératif provoque des impulsions sur le bus CC vers la
résistance, transformant l’excès d’énergie en chaleur. Il s’agit
d’une méthode très efficace pour contrôler l’excès d’énergie et
la vitesse du moteur
Informations supplémentaires sur les circuits
régénératifs. Plusieurs assemblages régénératifs se
retrouvent sous la forme de kits complets (un transistor et
une résistance). Typiquement, une paire de fils torsadés
blindés est utilisée pour le transistor et le câblage de
puissance du bus.
Certains kits possèdent des assemblages transistor-
résistance indépendants. Si la valeur en ohm du kit est trop
faible, le courant qui passe à travers le transistor sera trop
élevé et pourra détruire le transistor. Si un court-circuit
survient, il affectera le bus et détruira possiblement la batterie
de condensateurs et la section du convertisseur. Plus la
valeur en ohm du kit est faible, plus le couple de freinage sera
élevé. Le courant de freinage peut être calculé en divisant la
tension dans le bus au moment de la phase de régénération
par la valeur en ohm.
Exemple : Soit un contrôle d’entrée de 200 hp 460V CA qui
régénère de 780V CC à 800V CC avec une résistance de
7,9 ohms.
Tension moyenne dans le bus durant la décélération =
(780 + 800)/ 2 = 790V CC
Courant de freinage moyen = (790V DC) / 7.9 ohms = un
courant CC régénératif de 100 ampères.
Calcul de la charge d’un palan
La valeur en watts est reliée au freinage total sur la période
de temps requise. Calculez la valeur en watts de la façon
suivante :
1. Calcul du cycle de freinage :
Cycle = Temps de descente / Temps total du cycle
2. Calcul de l’énergie de freinage devant se dissiper dans
les résistances dynamiques de freinage :
Watts = (cycle x lb x FPM x efficacité) /44
Ib = poids de la charge
FPM = pieds par minute
Efficacité = efficacité mécanique (95
% = 0,95)
Temps = secondes
Calculs généraux des charges
1. Calcul du cycle de freinage :
Cycle = Temps de freinage / Temps total du cycle

Fiche technique no 34 Amplificateurs MLI
TN34-5
2. Calcul du couple de décélération :
TDécél = {(changement de tr/min x Wk
2
) / (308 x
temps)} - Frottement (lb pi)
TDécél = couple de décélération (Ib-
pi) Wk
2
= Inertie (lb pi
2
)
Temps = secondes
3. Calcul de l’énergie devant se dissiper dans les
résistances dynamiques de freinage :
Watts = TDécél x (Smax - Smin) x cycle x (0,0712)
Smax = Vitesse pour enclencher le
freinage
Smin = Vitesse après freinage
Multiplication des watts calculés à l’étape 3 par 1,25 pour
compenser les charges imprévues (facteur de sécurité).
Si la valeur en ohm du kit est trop élevée (pas suffisamment
de couple de freinage), l’amplificateur signalera des erreurs de
bus. Si la valeur en watts est trop faible, le contrôle pourra
calculer qu’une trop grande quantité d’énergie régénératrice
circule dans la résistance et fermera le circuit. Si le contrôle
n’effectue pas ce calcul, le kit aura un thermostat bipolaire
fermant normalement et pouvant être câblé avec le circuit de
contrôle afin de s’arrêter si une surchauffe est enregistrée.
Sauf si ces deux options sont appliquées, un surplus
d’énergie pourra déclencher un incendie.
Régénération de la ligne.
Le SCR et le contrôle transistorisé
en amont permettent à l’énergie régénérée de retourner dans le
système de distribution de puissance. Il s’agit d’une solution très
efficace aussi bien que peu coûteuse pour des applications
utilisant la régénération telles que :
• Dynamomètres
• Ascenseurs
• Palans
• Supports de dérouleuse
• Véhicules électriques
• Descentes de convoyeurs
LA SECTION DE CONTRÔLE
La section de contrôle est celle où toutes les parties se
rejoignent. Elle peut fonctionner à faible tension CA ou CC,
chacune possédant ses propres avantages. La logique CA,
par exemple, n‘est pas aussi vulnérable que la logique CC aux
fluctuations de courant sur le bus ou aux bruits et aux
harmoniques qui atteignent l’alimentation. Par contre, la
logique CC peut rester en fonction plus longtemps qu’une
logique CA lors d’une chute de puissance.
Les circuits suivants sont typiquement intégrés dans la
carte logique (section de contrôle).
•
Niveaux bus CC.
Détermine quand couper le contact
autour des résistances à démarrage doux (soft-start) ou de
fermer le SCR.
•
Courant de bus CC.
Procède à un échantillonnage du
courant du bus CC et le compare à l’entrée et à la sortie afin de
déterminer si ce courant se rapproche des limites prescrites
pour le condensateur et le convertisseur.
•
Courant de sortie.
Procède à un échantillonnage du
courant de sortie afin de déterminer si une ou des branches du
circuit sont ouvertes et si le courant est équilibré. Il détermine
également la fréquence de glissage et modifie le MLI pour
des accélérations en douceur.
•
Somme des courants d’entrée.
Il arrive souvent
qu’un transducteur de courant soit enroulé autour des
lignes de puissance (triphasées). Si le courant est
correctement équilibré dans les trois branches du
circuit, la sortie sera de valeur nulle (0). Si une branche
est mise à la terre, la sortie sera élevée et le contrôle
signalera une erreur de mise à la masse.
•
Interrupteur de température ou thermistor.
Un
interrupteur de température ou un thermistor installé au dos
du dissipateur thermique du contrôle est jumelé à la carte
de contrôle afin de fermer le contrôle dans le cas d’une
surchauffe interne.
De plus, la section de contrôle permet à l’utilisateur de le
configurer pour un type particulier d’application. Ce peut être
aussi simple que de tourner quelques potentiomètres ou
encore plus complexe comme de devoir connecter le
contrôle à un réseau afin qu’il puisse être surveillé par
l’intermédiaire de lignes téléphoniques ou par un système
multi chutes.
La section de contrôle est aussi l’endroit où l’on indique à
l’appareil de quelle façon il doit opérer (démarrage, arrêt,
accélération à une vitesse donnée, recul, etc.). Les méthodes
les plus populaires sont:
• Clavier de contrôle
• Boutons-poussoirs marche/arrêt et potentiomètre de
vitesse
• Commutateur de sélection de vitesse (potentiomètre
numérique)
• Potentiomètre électronique motorisé
• PLC interfacé à l’amplificateur
• Système de gestion de construction interfacé avec
l’amplificateur
• Contrôleur de point de réglage interfacé avec
l’amplificateur
• Communication informatique avec le contrôle
• Contrôle en réseau
• Contrôleur de position effectuant des mouvements
coordonnés
Les éléments qui fournissent des éléments de
rétroaction (« feedback ») aux amplificateurs MLI sont :
MLI PMDC
(Permanent Magnet Direct Current)
– Tachymètres pour les contrôles de vitesse des
amplificateurs
– Encodeurs pour le contrôleur de position
– Courant du moteur
Onduleurs
– Courant du moteur
Contrôle sans encodeur
– Courant du moteur
Contrôle vectoriel
– Encodeur
– Résolveur
– Courant du moteur
Contrôles sans balais
– Résolveur
– Effet Hall
– Courant du moteur
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%