Champ tournant et machines

1A – 2006-2007 – J. Delamare
(diapositive N°1)
I Champs tournants

1A – 2006-2007 – J. Delamare
(diapositive N°2)
Champ créé par un courant

1A – 2006-2007 – J. Delamare
(diapositive N°3)
Champ créé par une phase
• Champ pulsant

1A – 2006-2007 – J. Delamare
(diapositive N°4)
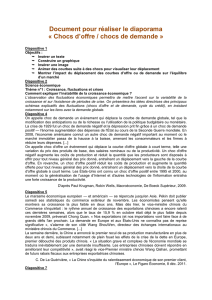
Théorème de Leblanc
1
B
r
a
t
ω
t
ω
−
2
B
r
B
r
Un champ pulsant peut être décomposé en 2 champs
tournant en sens contraires.

1A – 2006-2007 – J. Delamare
(diapositive N°5)
Champ créé par une phase
• Théorème de Leblanc
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
1
/
66
100%