Dossier et schéma electric karting moteur DC

1
UNIVERSITE DE PICARDIE JULES VERNE
INSTITUT UNIVERSITAIRE DE TECHNOLOGIE DE L’AISNE
DEPARTEMENT GENIE MECANIQUE
DEPARTEMENT GENIE ELECTRIQUE ET INFORMATIQUE INDUSTRIELLE
13, Avenue François Mitterrand, 02880 CUFFIES SOISSONS
M1
M
1
2
km4
13
14
KM4
A1
A2
1
2
J1
1
2
3
M2
M
1
2
J2
1
2
3
J3
1
2
3
1
2
1
2
1
2
1
2J4
1
2
3
J5
1
2
3
variateur 1
sw200
variateur 2
B+
A
B- B-
B+
M1 M2

2
Pour avoir plus de puissance et concourir contre les kartings thermiques de compétition (40CV=30 kW), 2
moteurs à courant continu de 48V, 215A, 8.5 kW en nominal seront utilisés. Il est possible de monter en
tension 72V pour avoir plus de puissance et de vitesse. Mais attention, car il y a aura une diminution de
l’autonomie, donc il faudra mettre plus de batterie.
Il n’est pas si simple de commander les 2 moteurs en même temps. Donc, nous allons étudier les différentes
possibilités ainsi que les solutions que nous avons retenues.
1. Etude du moteur Lynch LEM 200 127_48V.
Nous avons choisi le moteur Lynch 127, le plus puissant qui existe sur le marché. Nous avons réussi à les
avoir d’occasion avec 50% de réduction donc à 600 Euros l’unité. Le moteur pèse 11Kg.
1. Données fourni par le constructeur du mteur lynch
Pour diminuer le courant demandé aux batteries, on aurait pu prendre 6 batteries de 12V=72V et choisir un
moteur D127 pour avoir encore plus de puissance. Mais, on alourdi fortement le karting si on prend des
batteries au plomb, par contre cette tension est approprié pour des batteries li-on ou li-po.
De plus, il faudra 6 chargeurs pour les 6 batteries.
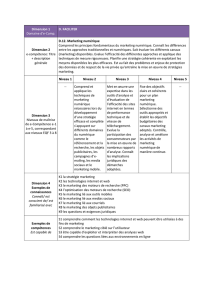
Les courbes relatives suivante donnent la puissance, la vitesse, le courant et le rendement du moteur en
fonction de la couple résistant mécanique utile sachant que la puissance max = 26 KW , la vitesse max = 329
rad/s=3049 tr/mn pour une tension de 48V. Le rendement maximal est pour 15 N.m, avec
une valeur de 88 %.
On peut observer que le rendement est correcte à partit du couple résistant supérieur à 5 N.m.
Si on trace ces courbes à partir du couple de démarrage, la courbe est la suivante :
0 5 10 15 20 25 30 35 40
0
0.2
0.4
0.6
0.8
Pm Cr( )
Pm CrPmMax( )
w Cr( )
U
KRCrv
K2
⋅−
I Cr( )
300
ηCr( )
Crηmax
Cr
P
n
=9 kW
C
n
=28
N.M
I
n
=188 A
N
n
= 2700 tr/mn
N.M

3
Le couple résistant au niveau des roues dépend des frottements de la piste, du type de pneu, de la vitesse…
Mais aussi du choix du réducteur (Voir le dossier de l’étude mathématique de la transmission d’un karting du
présenté au challenge 2009 et téléchargeable dans son intégralité).
En effet, Le choix du réducteur peut privilégier soit le temps d’accélération soit la vitesse maximale, soit la
consommation énergétique ou un compromis de tout cela.
Le galet de transmission est choisi de 80. C’est la valeur maximale que l’on peut mettre sinon le galet touche
le sol. Cette valeur permet de choisir un grand nombre de galet moteur.
En fonction du courant max, Le choix de la transmission conditionne la vitesse max mais aussi le temps pour
atteindre la vitesse max et le temps pour atteindre 50m, le courant en régime établi de vitesse. On indiquera
l’inertie ramenée sur l’arbre moteur, ainsi que les valeurs précédentes dans le tableau suivant :
I
max
réduction
Inertie kg.m
2
V
m
ax
(km/h)
t(s) Vmax
t(s) 50m
I (A) R.E
600
60/80
3.2
107
4.9s
x
X
600
48/80
1.5
73
1.3
3.6
x
600
24/80
0.37
36
0.58
5.18
20*2
300
60/80
3.2
107
X
300
48/80
1.5
73
4.7
4.8
x
300
24/80
0.37
36
1.17
5,4
20*2
Nous rappelons que le choix optimal du réducteur en fonction du couple max et du temps pour atteindre
une distance minimale correspond à l’équation suivante :
3
1
3
roue
22
eargchmoteur
MasseRayon)
60
2
(N
)CoupleCouple(
cetanDisducteurRe
⋅⋅
π⋅
⋅
−
⋅=
(equ 1)
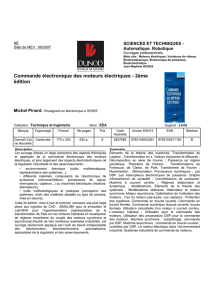
On rappel que le rayon des roues des kartings est de 12,5 cm et les moteurs ont en général une vitesse nominale de 3000
tr/mn.
0 50 100 150 200 250 300 350
0
0.2
0.4
0.6
0.8
Pm Cr( )
Pm CrPmMax( )
w Cr( )
U
KRCrv
K2
⋅−
I Cr( )
Imax
ηCr( )
Crηmax CrPmMax
Cr
C
n
=28 N.M C
demarage
=350 N.M
Regime transitoire
Régime établi

4
Il y a 3 possibilités d’accoupler ces 2 moteurs sur le karting :
- Les deux sur le même arbre de transmission (asservissement de couple) addition des couples.
- Chaque moteur entraine indépendamment une des 2 roues arrières sans différentiel avec un
asservissement de vitesse (il y aura des oscillations du train arrière lorsque le véhicule tourne car la
roue de pivot devrait aller moins vite que l’autre)
- Chaque moteur entraine indépendamment une des 2 roues arrière avec un différentiel (un
asservissement de couple suffit).
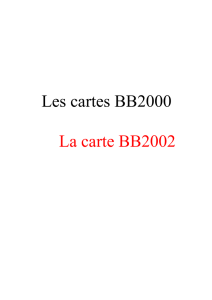
2. Etude de la répartition des masses
Il faut savoir que le châs
sis d’un karting se déforme et
que la
roue arrière en pivot se soulève légèrement (voir
complètement) et minimise le frottement. Pour s’en
convaincre, avec 4 balances posées sur chaque roue, on a
mesuré les forces sur chaque roue comme sur la figure
suivante.
La répartition des masses est de 60% à l'arrière et 40% à
l'avant, dixit les fabricants et les pilotes de Kart thermique.
Mais on ne sait pas si c'est avec ou sans le pilote...
2. Karting de Tour en train de
se faire peser avec 4 balances
mécaniques
Nos mesures sont :
Karting 2 moteurs 172 à 188 kg sans pilote
Direction volant
Roue AV
Gauche
Roue AV
droite
Roue AR
Gauche
Roue AR
droite
Tou
t droit
38
ou 34
38
ou 34
47
ou 60
47
ou 60
droite
0
66
80
26
gauche
75
0
22
83
Karting bi moteurs 188 kg avec pilote de 80 kg 188+80=268
Direction volant
Roue AV
Gauche
Roue AV droite
Roue AR Gauche
Roue AR droite
Tout droit
52
52
82
82
droite
2
9
80
90
69
gauche
80
29
69
90
268/2=134 134*0,4=53kg 134*0,6=80kg il y a 40% à l’avant et 60% sur l’arrière
Karting moteurs asynchrone 197 kg sans pilote de
Direction volant
Roue AV
Gauche
Roue AV droite
Roue AR Gauche
Roue AR droite
Tout d
roit
42
42
42
71
droite
18
70
84
29
gauche
80
12
79
12
On peut voir qu’il y a une dissymétrie de poids de l’arrière, car le moteur est à droite.

5
3. Etude de l’accouplement des 2 moteurs
Avec l’accouplement différentiel (les 2 roues arrière sont indépendantes) donc, il y aura moins de
frottement, lorsque le vehicule tourne.
L’accouplement des deux moteurs sur le même arbre moteur est le plus simple à réaliser, avec l’addition des
couples comme sur un vélo tandem, ou sur un velo électrique (force musculaire et force électrique). Donc
nous avons retenus cette dernière solution.
De nombreux variateurs existent sur le marché, nous allons choisir un type.
4. Choix du variateur
Il n’y a pas de variateur sur le marché pour commander les deux moteurs à la fois. Les différents
constructeurs sont :
- Alltrax,
- Curtis nous connaissons mal se produit,
- SEVCON, il nous subventionne un variateur sur les 2. De plus, nous avons déjà le doongle du variateur
Millipak. Les variateurs Powerpak sont plus puissants mais le doongle est différent. Par conséquent, nous
avons choisi d’utiliser le millipak.
Les caractéristiques du vario millipak 4 quadrants (hacheur en pont) sont :
120 A en nominal, 300A pendant une minute, sous 48V (marche avant et arrière et freinage)
Donc, ce variateur n’est pas trop adapté aux moteurs choisi qui demandent 200 A en nominal, 400A pendant
10 minute.
Par contre, le millipak est aussi vendu avec un seul quadrant (hacheur abaisseur), ces caractéristiques sont :
300 A en nominal, 600A pendant une minute, sous 48V, (marche avant seulement)
Pourtant la marche arrière est bien pratique (après une erreur de pilotage, pour garer le kart…).
Par conséquent, il y a deux solutions pour garder la marche arrière.
- Il est possible de mettre un millipak 4 quadrants sur un moteur et un millpak 1 seul quadrant sur
l’autre moteur
- il est possible d’utiliser un contacteur inverseur SW202 de chez albright (190Euos double inverseur
unipolaire qui peut supporter 400A en nominal). Ce contacteur permet d’inverser la tension aux
bornes d’un seul des 2 moteurs vu le prix. D’ailleurs, Il n’y a pas besoin de beaucoup de puissance
lors de la marche arrière.
Nous allons détailler ces 2 solutions
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%