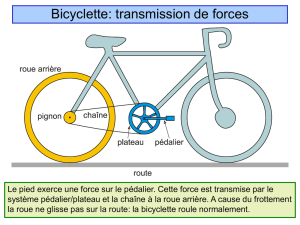
11.1 et 11.2 Roue

1
11.1 Cinématique de rotation
Quelles équations prendrons-nous pour traiter le
mouvement d’une roue qui roule sans glisser?
Autrement dit , qui effectue à la fois un mouvement de translation et
de rotation soit un roulement
Que se passe-t-il avec du glissement?
Roulement : Cas particulier de rotation
Pas de relation simple.
Sans glisser

2
11.1 Cinématique de rotation
Cherchons d’abord la relation entre la vitesse du centre de masse de
la roue et sa vitesse angulaire lors que la roue roule sans glisser
Quel déplacement la roue aura-t-elle effectué après un tour?
TR
vCM
π
2
=
RvCM
ω
=
RC
π
2=
ω vCM
vCM
ω
T
π
ω
2
=
donc
car

3
11.1 Cinématique de rotation
vCM
ω
Donc à chaque instant lorsque la roue roule sans glisser, la relation
entre la vitesse de la roue et sa vitesse angulaire est
RvCM
ω
=
m/s
Que peut-on dire de l’accélération de la roue ( centre de masse ) et
de son accélération angulaire lorsque la roue roule sans glisser?
Par définition, nous aurons :
Ra
CM
α
=
m/s2
Si la roue glisse, c’est plus compliqué, il faut plus d’informations

4
11.1 Cinématique de rotation
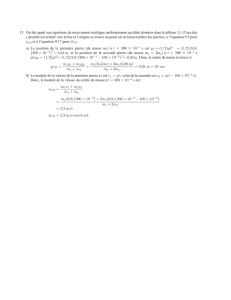
Exemple : Une automobile munie de freins ABS, dont les pneus ont
un rayon de 25 cm et qui roule à 100 km/h s’arrête sur 50 m sans
bloquer les roues. Déterminez,
a) l’accélération angulaire des roues
b) le nombre de tours effectués par les roues avant de s’arrêter
Situation:
∆ x
Problème : Je cherche α

5
11.1 Cinématique de rotation
xavv o∆−= 2
22
Situation:
∆ x
aCM
vCM
x
Solution possible: Pour le centre de masse, selon les équations du
m.r.u.a nous aurons
xavo∆−= 20 2
2
2
2m/s 72,7
502 )8,27(
2=
×
=
∆
=x
v
ao
Puisque le freinage se fait sans glisser, nous avons
RaCM
α
=
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%