1 introduction

Guide de référence
sur l’efficacité énergétique de
MOTEURS
% DU
COUPLE
ASSIGNÉ
30
0
0 20 40 60 80 100
100
200
400
% DE LA VITESSE ASSIGNÉE
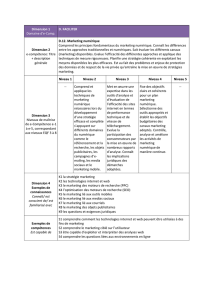
C.C.
C.A.
60 Hz
S
N
PÔLE DU
STATOR
BALAI
COLLECTEUR
LIGNE

CLAUSE DE NON-RESPONSABILITÉ : Ni
CEA Technologies Inc., ni les auteurs, ni les commanditaires, ou
toute autre personne agissant en leur nom, ne seront en aucun cas
tenus responsables quant à l’utilisation, ou aux dommages
résultant de l’utilisation, des informations, matériels, équipements,
produits, méthodes ou procédés, quels qu’ils soient, décrits dans le
présent guide.
Il est conseillé de faire appel à des professionnels accrédités pour
la mise en œuvre des directives et recommandations contenues
dans le présent guide.
Ce guide a été préparé par Carl Keyes, Ing., de Kinectrics Inc.
pour la Groupe d’intérêt sur les Solutions énergétiques pour les
clients (GISEC) de CEA Technologies Inc. (CEATI) avec le
parrainage des entreprises d’électricité membres du Groupe ci-
après :
© 2007 CEA Technologies Inc. Tous droits réservés.
Des remerciements vont à Ontario Hydro, Ontario Power
Generation et tous autres organismes qui ont fourni les matériels
employés dans la préparation de ce guide.

TABLE DES MATIÈRES
Section Page
1 Introduction 7
2 Classification des moteurs 9
3 Pricincipes de fonctionnement 13
a. Principales composantes 13
b. Fonctionnement 13
c. Puissance et couple du moteur 15
d. Caractéristiques couple-vitesse des moteurs 17
4 Moteurs à courant alternatif (c.a.) 19
a. Moteurs à induction triphasés 21
b. Moteurs à cage d’écureuil 22
c. Moteurs à induction à rotor bobiné 26
d. Moteurs à induction monophasés 28
e. Moteurs à enroulement auxiliaire de
démarrage 31
f. Moteurs à condensateurs 32
g. Moteurs à bague de déphasage 36
h. Moteurs synchrones 38
i. Moteur à hystérésis 42
j. Moteurs universels 44
5 Moteurs à courant continu (c.c.) 47

a. Moteurs c.c. à excitation séparée 48
b. Moteurs c.c. à excitation série 50
c. Moteurs c.c. à excitation compound 51
d. Moteurs c.c. à aimants permanents 52
6 Moteurs perfectionnés 53
a. Moteurs à commutation électronique (MCÉ) 53
b. Moteurs à réluctance et à commutation
(SRM) 54
c. Moteurs à aimants permanents 55
d. Autres moteurs perfectionnés 56
7 Critères de choix d’un moteur 61
a. Aspects de l’alimentation électrique 61
b. Considérations à propos des moteurs 71
c. Charges entraînées 76
d. Vitesse 80
e. Démarrage et arrêt 80
f. Moteurs sur mesure 81
g. Conditions environnementales 81
h. Caractéristiques physiques 84
i. Efficacité énergétique et rentabilité 89
8 Dispositifs de commande des Moteurs 107
a. Protection des moteurs 107
b. Démarrage des moteurs 111

c. Arrêt d’un moteur 124
d. Régulation de la vitesse des moteurs 127
9 Entretien 135
a. Modes de défaillance courants 135
b. Fréquence d’entretien 135
c. Paliers 137
d. Vibrations 140
e. Isolation 141
f. Défaillances de paliers des entraînements
EFV 145
g. Mise à la terre 146
10 Réparer ou remplacer ? 149
11 Amélioration par moteur éconergétique 153
a. Redimensionnement d’un moteur 153
b. Réglages de la vitesse 153
c. Ajustements de la charge 154
d. Facteur de puissance 154
12 Sites internet recommandés 155
13 Glossaire 157
14 Bibliographie 171
15 Index 175
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
1
/
182
100%