Introduction à l`informatique temps réel

1
Introduction à
l’informatique temps réel
Pierre-Yves Duval (cppm)
Ecole d’informatique temps réel - La Londes les Maures 7-11 Octobre 2002
-Définition et problématique
- Illustration par des exemples
-Automatisme: contrôle, supervision, pilotage
-Médecine
-Navigation aérienne
-Production automatisée
- Traitement du signal
- radar
- Base de données temps réel
- Multimédia
- Télécommunications
-Résumé et terminologie

2
Types de systèmes informatiques
Systèmes transformationnels (calcul scientifique, gestion de BD)
- les données sont disponibles au lancement
- les instants de productions des résultats ne sont pas contraints
Systèmes interactifs (systèmes transactionnels ou outils bureautiques)
- les résultats dépendent de données produites par l’environnement
- les instants de production respectent des valeurs statistiques
Systèmes réactifs ou temps réel
- résultats entièrement conditionnés par l’environnement connecté
- les instants de production dépendent de la dynamique du procédé
Définition
Groupe CNRS sur la problématique temps réel 1988
Le comportement d’un système informatique est qualifié de
« temps réel » lorsqu’il est assujetti à l’évolution d’un procédé qui lui
est connecté et qu’il doit piloter ou suivre en réagissant à tous ses
changements états.

3
Validité d’un programme TR
Outre la correction algorithmique le temps intervient dans la
validité du programme:
-le temps de réaction doit être adapté aux événements externes
-Le programme doit pouvoir fonctionner en continu en maintenant
sa capacité à traiter le flux de données d’entrée
-les temps de calculs sont connus (estimés) et peuvent être utilisés
dans une analyse de réactivité
Valider un système temps réel c’est démontrer rigoureusement que
le système a le comportement spécifié
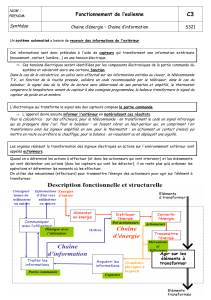
Exemple: contrôle numérique
Régulation ou asservissement simple
A/D
A/D
Loi de contrôle
calcul D/A
Entrée de
Référence
r(t) rk
yk
uk
procédécapteur actionneur
y(t) u(t)
yk, rk sont les valeurs
échantillonnées
k=0,1,2,3 …
à la fréquence T fixe
qui dépend du procédé
et de la loi de contrôle.
Exemple:
Dans un contrôle de moteur
d’automobile on échantillonne
plus fréquemment l’angle de rotation du
vilebrequin toutes les 10-6 sec que la température du moteur toutes les 10 sec

4
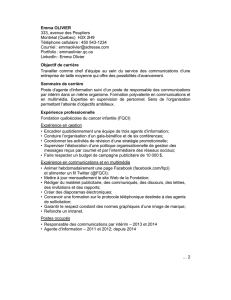
Exemple: contrôle, supervision et
pilotage de système
Ces systèmes recouvrent une gamme d’applications très large et
variée.
contrôle commande
et
pilotage
(multi-niveau)
interface
opérateurs
procédé
Interface physique
Ces systèmes ont une
architecture hiéarchique
avec au moins 2 niveaux:
bas - interface physique
haut - guidage/planification
commandesmesuresévénements
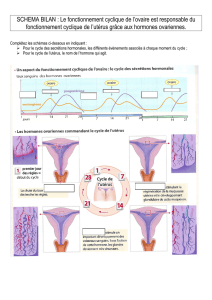
Exemple: contrôle, supervision
de patients
Niveau bas : contrôle de pression sanguine, rythme respiratoire, taux de glucose …
Niveau haut: système expert qui inter-agit avec le personnel médical et sélectionne
le tableau d’états à lui afficher
Variables (dépend de la
situation)
minutes ou heureshaut
Déterministe (toujours le
même code)
milliseconde à seconde
bas
Type exécutionpériodeniveau

5
Exemple: Générateur cyclique
Dans le cas de contrôleurs numériques ou pour les couches basses d’un contrôle de
Patient on peut adopter une architecture logicielle très simple de type
générateur cyclique.
Principe:
Le corps du programme est une boucle permanente qui tourne à une fréquence dite
cycle de base et qui active des activités dont la fréquence est un multiple du cycle de base.
On utilise un seul signal attaché à l’horloge et l’application gère à la fois l’activation
des différentes activités et leur ordre exécution.
Architecture très légère facile à implanter sur un micro-contrôleur sans OS.
Exemple: Générateur cyclique
Chaque 1/180 éme de seconde faire
- Lecture/validation des capteurs sélectionnés, si défaut reconfiguration
- Chaque 6 cycles (30 Hz) tâches avionique
- lecture claviers, sélection du mode
- normalisation des données et transformation des coordonnées
- mise à jour des référence pour la trajectoire
- Chaque 6 cycles (30 Hz) calculs
- loi de contrôle phase 1 pour le contrôle de la dérive (glissement plan)
- loi de contrôle phase 1 du roulis (axe horizontal)
- loi de contrôle phase 1 du travers (axe vertical)
- loi de contrôle de coordination des 3 axes
- Chaque 2 cycles (90 Hz) en utilisant les résultats des 2 cycles précédents
- loi de contrôle phase 2 pour le contrôle de la dérive
- loi de contrôle phase 2 du roulis et coordination des 2 axes
- Calcul loi de contrôle globale du travers à partir des résultats du cycle à 90hz
- Sortie des commandes pour les actionneurs
- Faire les auto-tests
Attente du cycle suivant
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%