Les mémoires - Academie pro

Chapitre 4 : Les mémoires
1. Introduction:
Nous savons que dans un ordinateur toutes les informations : valeur numérique,
instruction, adresse, symbole (chiffre, lettre,... etc.) sont manipulées sous une forme
binaire. Ces informations doivent en général être conservées pendant un certain
temps pour permettre leur exploitation. Ce rôle est dévolu aux mémoires chargées de
conserver programmes, données provenant de l’extérieur, résultats intermédiaires,
données à transférer à l’extérieur, etc.
On peut classer la mémoire en deux catégories principales. La mémoire de masse est
constitué par des supports le plus souvent magnétiques (disquettes, disques durs,
bandes, etc.). Les données et les programmes peuvent y être stockés de façon
prolongée. Ils ne s’effacent pas lorsque l’on coupe l’alimentation. En revanche, ce
type de support est assez lent. Lorsque l’ordinateur est en fonctionnement, les
données et les programmes dont il a besoin sont copies en mémoire centrale. Lorsque
l’on parle de mémoire sans plus de précision, c’est généralement de ce type de
mémoire qu’il s’agit.
Les mémoires à lecture et écriture ou mémoires vives permettent d’enregistrer une
information, de la conserver et de la restituer et sont à accès aléatoire (RA.M :
Random Acces Memory) c'est-à-dire que le temps d’accès à l’information est
indépendant de sa place en mémoire Cette appellation, d’origine historique, est
toujours synonyme de mémoire vive. Bien que très répandue cette appellation n’est
plus suffisante car tous les circuits à semi-conducteur sont aujourd'hui à accès
aléatoire. L’accès séquentiel ne porte plus que sur les mémoires magnétiques
(disques ou bandes). Par contre, une mémoire vive est volatile : la conservation de
son contenu nécessite la permanence de son alimentation électrique.
2. Hiérarchie des mémoires :
Les différents éléments de la mémoire d’un ordinateur sont ordonnés en fonction des
critères: temps d’accès, capacité et coût par bit. Les différents mémoires situées dans
l’unité centrale de traitement sont:
Les registres: accessibles immédiatement par le processeur, ils sont caractérisés
par une grande vitesse et servent principalement au stockage des opérandes et des
résultats intermédiaires.
La mémoire cache ou l’antémémoire: rapide, de faible capacité par rapport à la
mémoire centrale, utilisée comme mémoire tampon entre le CPU et la mémoire
centrale. Elle permet au CPU de faire moins d'accès à la mémoire centrale et ainsi
gagner du temps.
La mémoire centrale: c'est l'organe principal de rangement des informations
utilisées par le CPU. Pour exécuter un programme, il faut le charger en mémoire
centrale. Cette mémoire est une mémoire à semi-conducteur, mais son temps
d'accès est beaucoup plus grand que celui des registres et du cache.
La mémoire d'appui: sert de mémoire intermédiaire entre la mémoire centrale et
les mémoires auxiliaires. Elle est présente dans les ordinateurs les plus évolués et
permet d'augmenter la vitesse d'échange des informations entre ces deux niveaux.

la mémoire auxiliaire: c'est une mémoire périphérique de grande capacité et de
coût relativement faible utilisée pour le stockage permanent des informations, et
utilisent pour cela des supports magnétiques ou optiques.
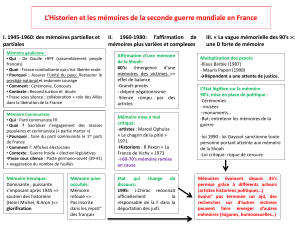
La figure 1 suivante montre une comparaison des différentes catégories de mémoires
dans un ordinateur, plus on s’éloigne du CPU vers les mémoires auxiliaires, on
constate que le temps d’accès et la capacité des mémoires augmentent, mais que le
coût par bit diminue.
Figure 1 : Hiérarchie des mémoires -- Avantages et inconvénients
3. Caractéristiques de la mémoire
Capacité: Dite aussi taille de la mémoire, elle correspond au nombre
d’informations qu’elle peut contenir. Elle est généralement exprimée en bits ou en
nombre de mots mémoire.
La table suivante résume les préfixes utilisés pour exprimer les capacités des
mémoires :
Symbole
Préfixe
Capacité
1 o
Octet
2 3 = 8 bits
1 k
Kilo
2 10 = 1024
1 M
Méga
2 20 = 1048576
1 G
Giga
2 30 = 1073741824
1 T
Tera
2 40 = 1099511627776
Table 1: Les unités de mesure de la capacité.
Temps d’accès: C’est le temps qui sépare le début de l’opération d’accès et sa
terminaison. Dans la pratique et pour plusieurs types de mémoire, le temps que
demande une opération de lecture peut être différent de celui d’une opération
d’écriture. Dans ce cas nous comptons le temps le plus long.
Cycle mémoire: C’est le temps minimal se coulant entre deux accès successifs à
la mémoire. Théoriquement, le cycle mémoire est égal au temps d’accès. Mais
Avantages
Rapidité
Accès direct
Faible taille
Inconvénients
Volatile
Faible capacité
Chère (prix/bit)
Avantages
Peu chère
Non volatile
Grande capacité
capacité
Inconvénients
Lenteur
Volumineuse

pratiquement le premier est plus long que le deuxième, car le bon fonctionnement
de la mémoire nécessite quelques opérations de maintient et de stabilisation des
signaux dans le circuit (ex: synchronisation).
Débit: C’est le nombre d’informations (exprimé en bits) lues ou écrites par
seconde. Le débit est appelé aussi bande passante. Il est exprimé en fonction du
cycle mémoire (CM) et la taille du mot mémoire (TMM) selon la formule
suivante :
CM
TMM
D
Volatilité: Elle caractérise la permanence des informations dans la mémoire
centrale. Une mémoire volatile perd son contenant lorsqu’on coupe le courant.
Celle ci a donc besoin d’un apport constant d’énergie électrique pour conserver
ses informations. La mémoire à base de transistors est volatile. On peut réaliser
des mémoires non volatiles avec les transistors moyennant un générateur de
courant électrique (batterie). Tel est le cas pour la mémoire CMOS qui contient les
paramètres de configuration de l’ordinateur. Il y a une autre catégorie de mémoire,
à base de résistances électriques, qui constitue une mémoire permanente. C’est le
cas de la mémoire centrale qui contient le bios.
4. Organisation des mémoires
4.1. Définitions
Le bit : C’est le plus petit élément d’information que l’on peut stocker dans une
mémoire, il constitue l’unité de base de l’information. Il est souvent appelé point
mémoire : il mémorise un bit d’information;
L’octet, ou byte (en anglais), correspond à un groupement de 8 bits;
La cellule mémoire (case) : C’est la plus petite quantité d’information adressable.
Ces dernières années, la plupart des fabricants se sont mis d’accord sur une cellule
de 8 bits, c’est à dire octet. Les octets sont eux-mêmes regroupés en mots.
Le mot (Word) : C’est un groupement de bits constituant une unité d’information
adressable en mémoire centrale (ex : 8, 12, 16, 24, 32, 36, 48, 60, 64, bits, ...),
c'est à dire que toute opération de lecture ou d'écriture porte sur un mot mémoire.
4.2. Organisation interne
Une mémoire est formée d'un certain nombre de cellules, ou cases, contenant
chacune une information. Chaque cellule a un numéro qui permet de la référencer et
de la localiser. Ce numéro est son adresse. Avec une adresse de n bits il est possible
de référencer directement au plus 2n cellules.
La capacité d'une mémoire est le nombre total de cellules qu'elle contient. Elle
s'exprime en nombre de bits, d'octets (bytes) ou de mots (words). Compte tenu de
l'adressage binaire, les capacités des mémoires s'expriment en puissances de deux ou
en multiples de 210 = 1024. La table 1 vu précédemment explicite les unités
utilisées.
Remarque:
Un ordinateur à mots de 16 bits a 2 octets par mot.
Un ordinateur à mots de 32 bits a 4 octets par mot.

4.3. Organisation externe (Connexions aux bus)
Les mémoires sont connectées à un bus adresses de n bits, un bus données de p bits
et des lignes de commandes (figure.2). Pour pouvoir communiquer avec le
microprocesseur, on va relier leurs bus ensembles. Pour cela, il est nécessaire d'avoir
adéquation entre le nombre de bits des bus de données et d'adresses de la mémoire et
du microprocesseur.
Figure 2: Organisation externe de la mémoire
Sur la figure 2 apparaît une broche de validation. Elle permet de sélectionner un
boîtier mémoire parmi plusieurs, d'où son appellation : "chip select"
Dans le cas général, il existe plusieurs boîtiers mémoire sur la carte, tous branchés
sur le même bus données. Dans ce cas, il est nécessaire de construire un signal qui
permettra à un seul boîtier d'accéder au bus données. Ce signal est appelé CS (chip
select) sélection de boîtier ou CE (chip enable) validation de boîtier. Il faut créer
autant de CS qu'il y a de boîtiers.
4.4. Comportement temporel
Sur chaque mémoire, on trouve les broches suivantes : RD, RW et CS. C'est le
microprocesseur qui gère ces signaux de la manière suivante :
Chronogramme de lecture/écriture.
Le microprocesseur positionne son bus adresses sur la case mémoire qu'il
veut lire ou écrire.
Les validations de boîtier CSi sont alors réalisées.
Le microprocesseur positionne alors sa broche lecture RD ou écriture WR
pour indiquer à la mémoire le moment où elle doit mettre l'information sur le
bus de données.
Le temps que met la mémoire pour le faire s'appelle le temps d'accès de la
mémoire.
Tous les signaux sont séquencés par une horloge. Le microprocesseur n'agit
que sur les fronts d'horloge.

5. Technologie
Nous allons nous intéresser aux mémoires les plus utilisées dans un micro-
ordinateur, les mémoires à accès aléatoire. Dans celles-ci, en connaissant l'adresse de
la ou des cases mémoire, on peut accéder directement à l'information.
On distingue deux types principaux de mémoires à accès aléatoire : les mémoires
vives et les mémoires mortes.
Les mémoires vives sont en général volatiles : elles perdent leurs informations en cas
de coupure d'alimentation. Certaines d'entre elles, ayant une faible consommation,
peuvent être rendues non volatiles par l'adjonction d'une batterie.
Le contenu des mémoires mortes est écrit par le fabricant ou par l'utilisateur.
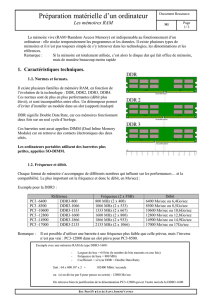
5.1. Les mémoires vives
Les mémoires vives les plus utilisées actuellement sont les mémoires RAM (Random
Acces Memory : mémoire à accès aléatoire). Il existe deux grandes familles de
mémoires RAM:
Les RAM statiques : Un bit mémoire d'une RAM statique (SRAM : static
RAM) est composé d'une bascule. Tant que le circuit est alimenté,
l'information est sauvegardée. Chaque bascule contient 6 transistors.
Les RAM dynamiques : Une RAM dynamique stocke un bit d'information
sous la forme d'une charge. Elle utilise pour cela l'effet capacitif de certaines
fonctions des semi-conducteurs (condensateur et transistor en technologie
MOS). Cependant, la charge stockée dans le condensateur élémentaire fuit et
au bout de quelques millisecondes, elle est presque entièrement perdue.
Pour préserver cette information, il faut la rafraîchir toutes les 2 ms.
Avantage: Une Cellule mémoire d'une RAM dynamique occupe 4 fois
moins de place que celle d'une RAM statique.
Inconvénients: il faut réaliser une logique de rafraîchissement sur la carte et
le rafraîchissement retarde les accès à la mémoire (1 à 5%).
Les différents types de mémoires dynamiques:
On distingue deux générations de mémoires dynamiques, la première génération est
dite mémoires asynchrone composée par la mémoire FPM et EDO (processeur 386,
486 et pentium d’Intel). La seconde génération est dite mémoires synchrones,
composée par la SDRAM, RAMBUS (ou DR-SDRAM), VC-SDRAM(ou VCM),
DDR-SDPM...
C’est la façon dont communiquent le processeur et la mémoire qui détermine si la
mémoire est synchrone ou asynchrone.
Les mémoires asynchrones
Quand le processeur fait un accès à ce type de mémoires (écriture ou lecture), il doit
attendre que celle ci ait terminé son travail, pour faire un autre accès. La mémoire
asynchrone génère des Wait-States (temps d’attente), la raison est que le processeur
ne sait pas quand l’information sera disponible par la mémoire pour être sur de
l’avoir, il n’a comme solution que d’attendre que la mémoire la lui transmette. S’il
ne le faisait pas, il pourrait la manquer et cela provoquerait des erreurs.
Parmi les mémoires asynchrones les plus commercialisées, on trouve:
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%