Chaîne fonctionnelle Structure machine

Sciences de l’Ingénieur Page 104
CI8_E7_commande chaîne W
Chaîne d’énergie, Chaîne d’information, PO & PC
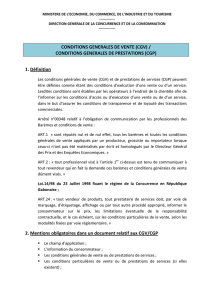
Chaîne fonctionnelle
Structure machine
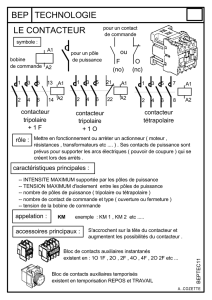
Actionneur : Convertir des énergies.
Préactionneur : Contrôler l’énergie nécessaire au fonctionnement des actionneurs en suivant
les ordres de l’unité de commande.
DISTRIBUER
TRANSMETTRE
CONVERTIR
Chaîne d'information
ACQUERIR
TRAITER
COMMUNIQUER
ALIMENTER
Energie
Capteurs
Pupitre commande
API
Electronique
Voyant
Pupitre Homme/machine
Ecran supervision
Alimentation
protection
actionneur
Préactionneur Transmissions
Effecteur
Chaîne d’énergie
Capteur sur
PO
Partie Commande Partie Opérative
Actionneur
• Moteur
• Vérin
• Lampe
• …
Effecteur
Préactionneur
• Distributeur
• Contacteur
• Relais
• …
Capteurs
• Position
• Proximité
• …
Unité de traitement
• API
• Electronique
• Câblage
• µc µp
Dialogue
Homme/Machine
• Supervision
• Pupitre
• Ecran tactile
Energie

Sciences de l’Ingénieur Page 105
CI8_E7_commande chaîne W
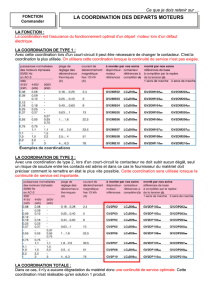
Contrôle en T.O.R d’un actionneur alternatif
Appareillage électrotechnique
Réaliser un sous système assurant un démarrage direct d’un moteur
asynchrone triphasé, en respectant les règles de protection des biens et des
personnes.
Fonction d’usage
Limite de ce type de commande
Le courant d’appel, lors d’un démarrage direct d’un moteur
asynchrone, peut s’élever à 7 fois son courant nominal. Ce courant
engendre l’échauffement des canalisations et des chutes de tension
importantes pouvant troubler le bon fonctionnement des autres
récepteurs de l’installation.
1 – Fonctions minimales requises par la norme
ETABLIR ET
PROTEGER LE
COURANT
W : réseau 230
/400v
E R
C
Puissance des moteurs
kW
Locaux et
nature du
brancheme
nt
Monophas
é
Triphasé
habilitation
1.4 5.5
Avec
réseau
3 11
W électrique
T.O.R
Marche /
Arrêt
Réglage
des
Choix de
l’appareillag
Contrôle T.O.R

Sciences de l’Ingénieur Page 106
CI8_E7_commande chaîne W
FONCTIONS MINIMALES
REQUISES
REGLES A RESPECTER SELON LA
NFC 15 100
SOLUTIONS RETENUES DESCRIPTIF
SECTIONNEMENT
• Coupure de tous les conducteurs actifs
• Ouverture hors charge
• Indication de l’état des contacts
• Possibilité de consignation
• Sectionneur tripolaire, porte fusible
• contact de pré-coupure mettant hors tension la
commande.
• Pleine apparence de la coupure
• poignée de manœuvre cadenassable
PROTECTION CONTRE
LES SURINTENSITES
• Protection contre les courts-circuits
• Protection contre les surcharges
• Coordination des protections
• Fusible aM (supporte la surcharge au démarrage
du moteur).
• Relais thermique (insensible aux surcharges).
• Respect des associations relais thermique / fusible
aM
COMMANDE
• Mise hors tension
• Protection contre les démarrage après une chute
de tension
• Sécurité des personnes et des biens (démarrage
intempestif et défaut d’isolement)
• Contact de pré-coupure du sectionneur
• Commande par BP, avec auto-maintient d’un
contacteur tripolaire.
• Fusible gG ou disjoncteur et mise à la masse du
circuit de commande.
COUPURE
DE
SECURITE
• Coupure de tout les conducteurs actifs
• Une seule manœuvre
• Enclenchement intentionnelle
• Coup de poing à accrochage coupant le circuit de
commande.
• Décrochage par clé.

Sciences de l’Ingénieur Page 107
CI8_E7_commande chaîne W
2 - Approche fonctionnelle de ce type de commande
W: RESEAU
400 V
TRI
PHASE
TRAITER
LES
DONNEES
CONSIGNER
ET
PROTEGER
CONTRE LES
COURTS-
CIRCUITS
CONTROLER
L’ENERGIE
DETECTER
LES
SURCHARGES
E:
CONSIGNATION
R: COURANT
NOMINAL
MOTEUR
E : MARCHE
ARRET
ARRET
D’URGENCE
SIGNALISATI
ON
W élec T.O.R
230 / 400 v
f 50 Hz
vers l’actionneur
Sectionneur
Contacteur
Relais
thermique
Partie commande

Sciences de l’Ingénieur Page 108
CI8_E7_commande chaîne W
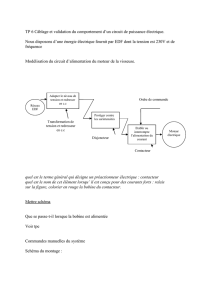
3 Approche structurelle de ce type de commande
Exemple : schéma électrique de la perceuse à colonne
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%