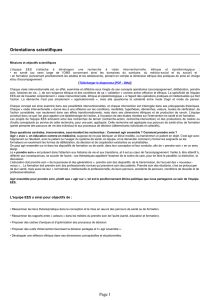
Un Microprocesseur de Comparaison Dynamique pour la



CONVERT.
A -> N
M
ICROPHONE
PTS
RAM ROM
STANDARD
INTERFACE
SYSTEME
HOTE
MODULE D'ANALYSE MODULE DE CONTROLE
BUS LOCAL
MEMOIRE
LOCALE
256K x 16
MODULE DE COMPARAISON
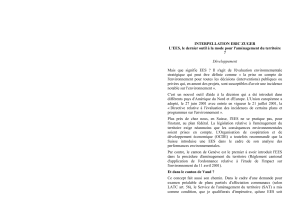
PCD
µ
PCD
µ
PCD
µ
MEMOIRE
LOCALE
256K x 16
MEMOIRE
LOCALE
256K x 16
P
µ
MEMOIRE
PTS
ADR8-0
DAT7-0
9
8
RESET CLK TEST VSS VDD
388
9
16
18
D15-0
AD17-0
AS
A8-0
INTERFACE
PROCESSEUR
HOTE
INTERFACE
MEMOIRE
LOCALE
CS
RD
WR
WAIT
SWAIT
INTX
M/D
ALE
RAS
CAS
OE
W0
W1
AVEC MEMOIRE
STATIQUE
AVEC MEMOIRE
DYNAMIQUE


18
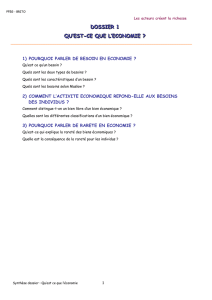
MEMOIRE
SPECTRALE
8 x 16
ACC. L1
16
8
8
8
8
. .
16
16 REGISTRES
DE
TRAVAIL
32 x 16
SHIFT
SAT
MIN 16
12
18 16
18
DONNEES
MEMOIRE
LOCALE
16 16
18 16
ADRESSES
MEMOIRE
LOCALE
18
B1 B2 B3 B4 I T X
MUX MUX
LOGIQUE DE
ROTATION
AUTOMATIQUE
DES VECTEURS
UNITE ARITHMETIQUE GENERALE
UNITE DE CALCUL D'ADRESSES UNITE DE CALCUL
DE DISTANCES
DECODEUR D'INSTRUCTION ET LOGIQUE DE CONTROLE
MEMOIRE DE
PROGRAMME
INTEGREE
RAM 640 x 24
SEQUENCEUR
COMPTEUR ORDINAL
ET PILE DE
SOUS-PROGRAMME
INTERFACE
PROCESSEUR
HOTE
24 10 24 24
16
24
ADRESSES
PROCESSEUR
HOTE
DONNEES
PROCESSEUR
HOTE
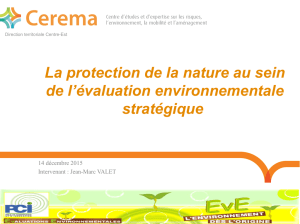
98
10
MUX
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%