Commande d`un système photovoltaïque à deux degrés de liberté

Revue des Energies Renouvelables ICRESD-07 Tlemcen (2007) 5 – 10
5
Commande d’un système photovoltaïque à deux degrés de liberté
par un moteur à reluctance variable contrôlé par DTC
A. Ameur*, A. Cheknane†, B. Mokhtari, M. Birame et A. Hamdi
Laboratoire d’Etude et Développement des Matériaux Semi-conducteurs et Diélectriques,
Université Amar Telidji, Laghouat, Algérie
Résumé - Dans cet article, nous contribuons à réduire le coût de l’énergie électrique produite par un
système photovoltaïque, en dirigeant le rayonnement solaire sur les photopiles. Notre installation est
munie d’un système de poursuite à deux degrés de liberté. Une rotation suivant l’axe vertical et une
autre suivant l’axe horizontal, sont assurées par un Moteur à Reluctance Variable (MRV),
commandé par la technique de ‘contrôle direct du couple’ dite DTC (Direct Torque Control), et
alimenté par un onduleur à travers des accumulateurs chargés par le panneau solaire
photovoltaïque, permettant ainsi un asservissement sur la position du maximum d’ensoleillement.
Par conséquent, notre étude s’est orientée essentiellement vers la partie commande du panneau
solaire.
Mots clés: DTC - Moteur à reluctance variable - Système photovoltaïque.
1. INTRODUCTION
La méthode de Contrôle Direct du Couple (DTC) a été introduite en 1985 par Takahashi et
Depenbrock spécialement pour les machines asynchrones [1, 2]. Ensuite, plusieurs études ont
permis de développer plus précisément la connaissance de cette commande. Cette technique de
commande a été appliquée aussi aux machines synchrones [3-5].
C’est une nouvelle stratégie de commande concurrentielle des méthodes classiques, basées sur
une alimentation par un onduleur à Modulation de Largeur d’Impulsions (MLI) et sur un
découplage du flux et du couple moteur par orientation du champ magnétique du stator.
En régime permanent, la tension statorique permet d’estimer facilement le flux statorique à
partir du courant et de la tension statoriques s
I, s
V. Le fait que la DTC commande directement
les interrupteurs sans passer par des régulateurs, améliore très nettement ses performances
dynamiques par rapport aux autres commandes.
Notre objectif, dans cet article, est d’utiliser la méthode décrite ci-dessus pour commander un
panneau solaire sur la position du maximum d’ensoleillement. Il convient de signaler que pour
parvenir à cet objectif, il faudrait munir le panneau solaire de deux degrés de liberté, à savoir:
1. une rotation suivant l’axe vertical permet au panneau solaire de suivre le déplacement du
soleil suivant les longitudes depuis son lever jusqu’à son coucher,
2. une rotation suivant l’axe horizontal permet au panneau d’être suffisamment vertical
pendant le lever et le coucher de soleil, et d’être plus au moins aplati pendant la mi-journée, en
d’autres termes de suivre le déplacement du soleil suivant les latitudes.
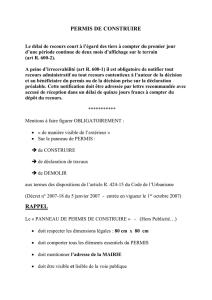
Le système proposé comprend essentiellement les parties suivantes (Fig. 1): (1) Commande
par DTC, (2) Machine à reluctance variable, (3) Onduleur, (4) Bloc de transmission, (5) Panneau
solaire et (6) Accumulateurs.
Dans le même contexte, le système de transmission de mouvement entre le panneau solaire et
l’actionneur s’avère d’une importance capitale. Plusieurs contraintes devront être prises en
considération, telles que:
• le choix du système de transmission de mouvement, et des matériaux `a base des quels sont
faits les différents éléments d’un tel système,
• le calcul de structure du système de transmission,

A. Ameur et al.
6
• l’étude vibratoire de l’ensemble moteur-système de transmission-panneau photovoltaïque, et
ce en tenant compte des couples pulsatoires qui sont souvent associés aux techniques de
commande directe du couple.
Fig. 1: Schéma synoptique des différents blocs d’un système
photovoltaïque à deux degrés de liberté commandé par DTC
L’étude entreprise dans cette communication s’est portée essentiellement sur la partie
commande décrite par le bloc (I) de la figure 1. Les autres parties constituant le système seront
l’objet d’un travail ultérieur.
2. MODELISATION
Les équations des flux statoriques et rotoriques peuvent être écrites dans le repère de Park
sous la forme suivante:
=
φ
φ
sq
sd
q
d
q
d
I
I
L0
0L (1)
Tandis que les équations des tensions statoriques s’écrivent dans ce même repère sous la
forme suivante:
−
Ω+
+
=
qs
ds
d
q
r
qs
ds
q
d
qs
ds
s
q
d
i
i
0L
L0
p
i
i
td
d
L0
0L
i
i
r
v
v (2)
D’autre part, le couple électromagnétique peut être exprimé par :
()
[]
sqsdqde IILLp
2
3
C−−= (3)
L’équation mécanique du moteur s’écrit ainsi :
Ω−−=Ω rre fCCJ (4)
3. DTC CONVENTIONNELLE
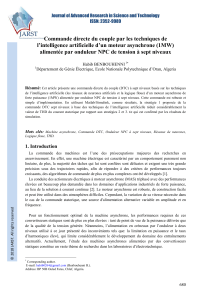
L’une des plus simples méthodes d’estimation consiste à mesurer les courants et les tensions
statoriques de la machine, et les employer dans la loi de commande directe du couple (DTC) qui
est schématisée par la figure 2. Cette méthode de commande utilise la reconstitution de flux et de
couple à partir de la relation (6) pour la détermination de la séquence d’alimentation à imposer à
l’onduleur triphasé à MLI vectorielle.
Le repère lié au stator permet d’estimer le flux et le couple, ce qui permet la connaissance de
l’amplitude et la position du flux statorique.
()
()
−=φ
−=φ
∫
∫
βββ
ααα
t
0
ssss
t
0
ssss
tdIrv
tdIrv
(5)

ICRESD’2007: Commande d’un système photovoltaïque à deux degrés de liberté…
7
La DTC est déduite en se basant sur les deux approximations décrites par les formules (6) et
(7) [1, 2, 4] :
() ()
EssEsss TVTVk1k ≈φ∆→+φ≈+φ (6)
(
)
()
δφφ=φ×φ= sinkkC '
rs
'
rse (7)
On a de plus :
φ
φ
=φ∠
φ+φ=φ
α
β
βα
s
s
s
2
s
2
ss
ˆ
ˆ
arctg
ˆ
ˆˆˆ
(8)
Selon la formule (5), on peut négliger la chute de tension statorique due à la résistance du
stator (cas des vitesses élevées par exemple). Avec cette supposition, la variation du flux est
proportionnelle à la tension statorique appliquée (6). Une tension appliquée dans la même
direction que le vecteur flux fait augmenter le module de celui-ci et vice versa.
Fig. 2: Schéma d’une commande DTC d’un MRV
alimenté par un onduleur triphasé à MLI
La DTC est basée sur la détermination directe de la séquence de commande appliquée aux
interrupteurs d’un onduleur de tension. Ce choix est basé sur l’emploi de comparateurs à
hystérésis dont la fonction est de contrôler l’état du système, à savoir l’amplitude du flux
statorique et du couple électromagnétique [2, 3].
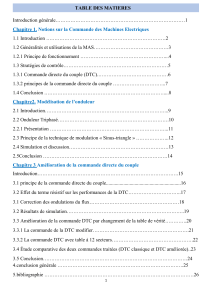
Par ailleurs, le tableau 1 présente les séquences correspondant à chaque position, sachant que
l’erreur entre le flux de référence et le flux estimé est introduite dans un comparateur à hystérésis
à deux niveaux, qui délivre 1 si cette erreur est positive et 0 si elle est négative. De même, l’erreur
entre le couple de référence et le couple estimé est introduite dans un comparateur à hystérésis à
trois niveaux, qui délivre 1 si elle est positive, 0 si elle est nulle, et -1 si elle est négative.
Tableau 1: Table de localisation des vecteurs tensions
s
φ∆ e
C∆ S1 S
2 S
3 S
4 S
5 S
6
1 V2 V
3 V
4 V
5 V
6 V
1
1 0 V0 V
7 V
0 V
7 V
0 V
7
-1 V6 V
1 V
2 V
3 V
4 V
5
1 V3 V
4 V
5 V
6 V
1 V
2
0 0 V7 V
0 V
7 V
0 V
7 V
0
-1 V5 V
6 V
1 V
2 V
3 V
4
où, Si=1,…,6 sont les secteurs de localisation du vecteur de flux statorique.

A. Ameur et al.
8
Fig. 3: Comparateurs à hystérésis utilisés pour commander le flux et le couple
4. RESULTATS DE SIMULATION
Le tableau 2, résume les paramètres du MRV utilisé dans la simulation.
Tableau 2: Paramètres du MRV
Paramètre Symbole Valeurs (SI)
Fréquence f 50
Puissance n
P 1000
Nombre de paires de pôles
p
2
Résistance statorique s
r 1.0
Inductance longitudinale d
L 0.072
Inductance transversale q
L 0.028
Inertie J 0.003
Fig. 4: Evolution de la vitesse de rotation d’un MRV au démarrage en charge suivi d’une
inversion de sens de rotation de 50 à -50 (rd/s) à partir de 0.25 (s)
Au démarrage, le moteur est chargé par un échelon de couple résistant égale à (2 N.m), le
couple électromagnétique atteint sa valeur maximale limitée (6 N.m) et se stabilise à une valeur
de (2 N.m).
On note que le couple électromagnétique suit convenablement sa consigne du couple avec des
ondulations relativement importantes (Fig. 5), tandis que le flux suit convenablement sa référence
(Fig. 6) et la vitesse répond sans dépassement au démarrage et lors de l’inversion de sens de
rotation avec un temps de réponse court (Fig. 4).
La position du panneau peut être commandée par l’intermédiaire d’un système d’engrenage
bien dimensionné (Bloc 4, Fig. 1).
La figure 7 illustre la bonne robustesse de la commande choisie, le moteur peut fournir alors
les positions désirées pré-calculées, afin d’aboutir à un système de suivi lorsque le soleil change
de trajet.
La figure 8 illustre le flux dans le plan
(
)
β
α
,.

ICRESD’2007: Commande d’un système photovoltaïque à deux degrés de liberté…
9
Fig. 5: Couple électromagnétique estimé et
réel confondus développé par le MRV
Fig. 6: Evolution de module des flux
statoriques estimé et réel du MRV
Fig. 7: Position du rotor du MRV
commandé par DTC
Fig. 8: Flux statorique du MRV
dans le plan
(
)
βα,
5. CONCLUSION
Notre étude a été orientée spécialement vers une stratégie de commande directe du couple
(DTC) d’un moteur à réluctance variable (MRV) alimenté par un onduleur à travers des
accumulateurs chargés par le panneau solaire envisagé pour l’entraîner selon le trajet solaire.
Cette commande est l’une des meilleures stratégies, chaque fois qu’un fort couple à l’arrêt est
demandé (condition nécessaire dans le cas de l’application considérée).
Pourtant et en tenant compte du compromis rendement/coût, il a été jugé utile d’utiliser un
système de transmission mécanique (engrenage) pour orienter le panneau dans les deux sens
considérés (verticalement et horizontalement), tout en adoptant une inclinaison permettant, en
moyenne le long d’une journée, de satisfaire la condition du maximum d’ensoleillement.
En plus, nos résultats de simulation, portant sur la technique de commande du MRV et donc
du système photovoltaïque, montrent bien que la méthode utilisée :
• se prête bien au fonctionnement sans capteur mécanique, ce qui va permettre de réduire de
façon considérable le coût de l’instrumentation à associer à l’entraînement,
• est réputée par sa robustesse vis-à-vis des variations paramétriques du moteur asynchrone,
qui est une qualité assez recherchée dans le cas de l’application considérée et ce compte tenu de
l’environnement hostile où les systèmes photovoltaïques sont souvent installés(de forts écarts de
température qui peuvent atteindre facilement vingt à trente degrés pendant la même journée).
 6
6
1
/
6
100%





![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)