Projet TOMOX Accélération de la reconstruction tomographique sur

Projet TOMOX
Acc´el´eration de la reconstruction tomographique
sur processeurs graphiques (GPUs)
Nicolas GAC, MCF Universit´e Paris Sud, L2S (GPI)
Ali Mohammad-Djafari, Asier Rabanal, Alexandre Vabre, Fanny
Buyens, Samuel Legoupil
Ecole ”Problemes inverses”, Porquerolles, 3 Mai 2010

Reconstruction CT avec segmentation
Architecture des processeurs graphiques
Reconstruction tomographique sur GPUs
1Reconstruction CT avec segmentation
Projet TOMOX
Algorithme bay´esien it´eratif du L2S/CEA
2Architecture des processeurs graphiques
GPU : Graphic Processing Unit
D´ecoupage en threads
Programmation GPU
3Reconstruction tomographique sur GPUs
Retroprojection sur GPU
Volumes et temps de reconstruction
4Perspectives

Reconstruction CT avec segmentation
Architecture des processeurs graphiques
Reconstruction tomographique sur GPUs
Projet TOMOX
Algorithme bay´esien it´eratif du L2S/CEA
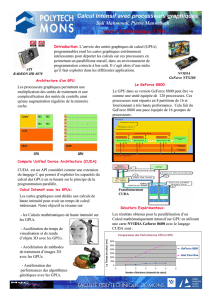
Projet TOMOX : Algorithmes innovants pour la
reconstruction en nano-tomographie X
Objet à imager
de l’objet
CEA−List
L2S/Supelec/CNRS/UPS
IMAGEUR 3D HAUTE RESOLUTION
Structure interne
− Algorithme innovant (brevet)
− Plateforme de microtomographie X
haute résolution
− Accélération sur processeurs graphiques
RECONSTRUCTION
ACQUISITION
?
2
1

Reconstruction CT avec segmentation
Architecture des processeurs graphiques
Reconstruction tomographique sur GPUs
Projet TOMOX
Algorithme bay´esien it´eratif du L2S/CEA
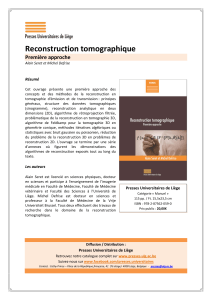
Projet TOMOX : Algorithmes innovants pour la
reconstruction en nano-tomographie X
Objet à imager
Tomographe
phi
Projections CEA−List
phi
L2S/Supelec/CNRS/UPS
IMAGEUR 3D HAUTE RESOLUTION
Structure interne
de l’objet
− Algorithme innovant (brevet)
− Accélération sur processeurs graphiques
?
− Plateforme de microtomographie X
haute résolution
ACQUISITION
RECONSTRUCTION
1
2
1

Reconstruction CT avec segmentation
Architecture des processeurs graphiques
Reconstruction tomographique sur GPUs
Projet TOMOX
Algorithme bay´esien it´eratif du L2S/CEA
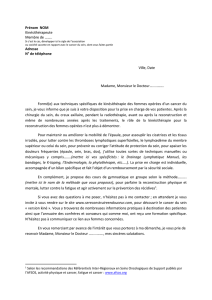
Projet TOMOX : Algorithmes innovants pour la
reconstruction en nano-tomographie X
Objet à imager
Tomographe
phi
Projections CEA−List
phi
L2S/Supelec/CNRS/UPS
IMAGEUR 3D HAUTE RESOLUTION
Structure interne
de l’objet
haute résolution
?
− Algorithme innovant (brevet)
− Accélération sur processeurs graphiques
− Plateforme de microtomographie X
RECONSTRUCTION
ACQUISITION
GPU
2
1
1
2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
1
/
48
100%