quelques facettes des effets du centrage magnétique sur

TN 15-1
(Mise-à -jour - 10/03)
FICHE TECHNIQUE NO 15 Des solutions fiables maintenant !
QUELQUES FACETTES DES EFFETS DU CENTRAGE
MAGNÉTIQUE SUR DES MOTEURS À INDUCTION
MUNIS DE PALIERS À COUSSINETS
Par Bob Brozek
Directeur, génie électrique
General Dynamics, Division des bateaux électriques
RÉSUMÉ
La présente fiche porte sur plusieurs aspects des effets
du centrage magnétique sur des moteurs à induction dotés
de paliers à coussinets. Nous passerons le tout en revue,
à commencer par la définition des termes, des sujets tels
que les composantes de force, centres faibles contre
centres forts, deux pôles comparativement à un plus grand
nombre de pôles ainsi que les effets de charge.
Quelques-uns des phénomènes les plus étranges
relativement aux positions de centrage magnétique flottant
et double y sont décrits.
GÉNÉRALITÉS
La définition de certains termes s’impose pour assurer
une compréhension rapide de la force de centrage
magnétique. Premièrement, on entend par jeu axial la
distance totale sur laquelle un rotor équipé peut se
déplacer axialement entre les limites fixées par les
surfaces de butée d’un palier à coussinet et les embases
de l’arbre correspondantes. On parle généralement de 13
mm (0,5 po) dans le cas des gros moteurs. Deuxièmement,
le centre mécanique correspond à la position du bloc rotor
à mi-chemin du jeu axial total. Le centre magnétique
correspond quant à lui à la position que vient occuper le
bloc rotor une fois alimenté en énergie. Une force de
centrage magnétique s'exerce lorsque le rotor se voit forcé
de quitter la position souhaitée vis-à-vis centre magnétique
quant des éléments extérieurs l'y entraînent. Lorsqu'un
rotor tourne librement au centre magnétique, la somme
des composantes de la force de centrage magnétique axial
est égale à zéro. C’est seulement lorsque le bloc rotor se
trouve déplacé de la position désirée que se manifeste une
force de rétablissement du centre magnétique.
Normalement, les centres magnétique et mécanique ne
coïncident pas en raison des variantes de fabrication
désirée au centrage magnétique. La figure 1 démontre la
nomenclature décrite.
LES COMPOSANTES DE LA FORCE DE CENTRAGE
MAGNÉTIQUE
Selon la conception de l’appareil, quatre composantes
de la force de centrage magnétique se manifestent. La
première se forme aux extrémités du noyau de stator de
concert avec celles du noyau de rotor. Lorsque des
conduits d’aération sont présents dans l’ensemble stator et
rotor, une deuxième composante se manifeste à
l’alignement des bords des conduits. Si les encoches du
stator ou du rotor sont inclinées, une troisième
composante naîtra en raison de la force exercée par
l'inclinaison. La quatrième composante de la force axiale
résulte de l’interaction entre le flux principal ou de
dispersion et le courant dans les bagues d’extrémité de la
cage du rotor. Cette dernière variable se révèle la plus
difficile à calculer. Elle prédomine dans les machines dont
les bagues d’extrémité sont situées à proximité de
l’entrefer principal (comme dans les rotors en aluminium
moulé) et au cours du démarrage où de forts courants sont
transportés par la cage du rotor. Dans les rotors
mécano-soudés, où les barres se prolongent bien au-delà
des bords du noyau et des bagues d’extrémité
correspondantes, cette force particulière se manifeste à
peine en régime établi.

Quelques facettes des effets du centrage magnétique Fiche technique no. 15
TN 15-2
(Mise-à -jour - 10/03)
Les deux premières composantes mentionnées
procurent une force proportionnelle aux variables de
l’équation ci-dessous. Voici le cas d’un moteur à induction
triphasé alimenté par une ligne électrique de 60 Hz.
F = K x E x I x [ Ef + Df ]
L
Où : K = une constante = 0,02
E = ligne de stator à la tension composée
I = courant de la ligne de stator à vide
L = longueur en pouces du noyau empilé
Ef = somme des facteurs de force des extrémités
de noyaux
Df = somme des facteurs de force des conduits
d'aération individuels stator-rotor
Dans le cas d’un moteur sans évent, la variable Df sera de
zéro, tandis que dans une version munie de nombreuses
prises d’air destinées au stator et au rotor, la variable Df
pourrait devenir plus importante que l’influence des
extrémités de noyau (Ef). Si le moteur ne se trouve pas au
niveau, il existe la composante axiale du vecteur de masse
dont il faut tenir compte en plus des autres facteurs
mentionnés. La direction du poids axial dépend du sens de
l’inclinaison.
MOTEURS BIPOLAIRES
Ces moteurs se caractérisent par des centres
magnétiques mous ou faibles. Il s’agit principalement du
résultat de leur construction sans aucune prise de
refroidissement radiale dans le rotor. En général les
moteurs bipolaires sont exempts de prises d’air de rotor et
d'ouvertures d’alimentation axiales connexes afin de
favoriser la capacité de transport du flux dans le noyau du
rotor et les cheminements d’arbre et d’atténuer le plus
possible le bruit aérien. On peut voir les méthodes
de montage les plus courantes des noyaux de stator et
rotor à la figure 2, de A à C. L’image 2 A montre un bon
exemple de construction à noyau court de faible
puissance [moins de 300 à 400 HP (225 à 300 kW)] et
dans lequel aucun passage d’aération radial du stator ne
se révèle nécessaire pour le refroidissement, alors que
les modèles 2 B et C sont plus fréquents dans les
moteurs plus puissants. Les avantages du modèle 2 B
sont les suivants : Aucune tôle supplémentaire n'est
requise pour compléter le noyau de rotor (comme points
de désexcitation des vides du stator) et une masse
moindre du noyau de rotor hausse la fréquence critique
de l’arbre. Son désavantage principal est qu’une certaine
partie du fer net du stator se révèle inefficace à
transporter le flux total de l’appareil. Aux mêmes valeurs
brutes de longueur de noyau et de flux, un moteur
fabriqué selon le modèle de la figure 2 B fonctionnera à
des densités de flux plus élevées, si on le compare à
celui de la figure 2 C. Ce qui se solde par des pertes
dans le fer plus élevées, davantage de tension
magnétisante et un facteur de puissance plus faible à
pleine charge.
En raison de leurs faibles forces de centrage magnétique,
les rotors de moteurs bipolaires peuvent se voir
facilement déviés de leur centre magnétique. On peut le
constater en faisant tourner le moteur désaccouplé à
vide et en exerçant une poussée axiale sur le bout
d’arbre. Un faible effort suffira à déplacer l’arbre et ce,
même dans le cas de versions aussi puissantes que
celles développant de 2 000 à 3 000 HP (1 500 à
2 200 kW).
Autre effet que l’on peut parfois observer dans les
moteurs bipolaires, leur centre magnétique semble flotter
ou osciller autour de la marque tracée sur l’arbre. Ce
phénomène n’est pas dû à une modification de la force
de centrage magnétique absolue, mais bien à des forces
d’écoulement de l’air à une des extrémités du rotor qui
ne sont pas parfaitement équilibrées. On peut vérifier
rapidement ce phénomène, il suffit de faire tourner le
moteur désaccouplé et à vide. Si le moteur se trouve
ventilé aux deux extrémités et qu’une des prises d’air est
partiellement ou totalement obstruée, le déséquilibre des
forces d’écoulement de l’air entre les extrémités du
moteur entraînera un mouvement axial du rotor. Quand
on obture la prise d’air opposée, le rotor se déplace en
sens inverse. Le centre magnétique se détermine à la
fois par la véritable force de centrage magnétique et par
les forces d’écoulement de l’air qui s’opèrent à chaque
extrémité du rotor. Comme on le verra plus loin, une
méthode permet d’augmenter la force de centrage
magnétique sans toutefois avoir à modifier la densité du
flux dans l'entrefer.
QUATRE PÔLES ET PLUS
Contrairement aux modèles bipolaires, les moteurs à
plus basse vitesse comportent normalement des
passages d’aération radiaux au noyau de rotor si le
noyau de stator en comprend. Les problèmes de la
capacité de transport de flux, de bruit aérien et de
fréquence critique de l’arbre ne se font pas aussi
préoccupants que pour les modèles à deux pôles.
A
B
C
FIGURE 2 : DISPOSITIONS DE NOYAUX
MAGNÉTIQUES DE MOTEURS BIPOLAIRES
Stator
Rotor
Noyau court, conception basse puissance
Stator
Rotor
Noyau long, conception haute puissance
Noyau d’induit net = Noyau de rotor net
Stator
Rotor
Noyau de rotor net > Noyau d’induit net

TN 15-3
(Mise-à -jour - 10/03)
Les figures 3 A, 3 B et 3 C montrent diverses
dispositions de noyaux de moteurs qui possèdent un plus
grand nombre de pôles, la figure 3 A illustrant encore une
fois la disposition des noyaux de moteurs de plus faible
puissance.

Quelques facettes des effets du centrage magnétique Fiche technique no. 15
TN 15-4
(Mise-à -jour - 10/03)
On utilise le modèle 3 B pour les moteurs moyens et le 3 C
pour les versions plus imposantes. Le choix entre ces deux
types de conception repose sur un critère, soit le niveau de
bruit produit. Les prises d’air alignées du stator et du rotor
auront tendance à se montrer plus bruyantes que
lorsqu’elles se trouvent volontairement désalignées. À l’air
libre, cette source de bruit produira un son pur pouvant se
faire très discret. Elle produit aussi une fréquence (en
fonction du nombre d'encoches de rotor multiplié par la
vitesse du rotor) qui se situe habituellement dans une
largeur de bande à laquelle l’oreille humaine est très
sensible. Cela se manifeste particulièrement dans les
moteurs à quatre et à six pôles.
Les moteurs à plusieurs pôles ont automatiquement des
centres magnétiques plus forts que les versions bipolaires,
car ils exigent davantage de courant magnétisant.
Cependant, les centres magnétiques des modèles munis
de prises d’air alignées ont encore plus de force en raison
de la présence des forces de centrage des conduits
d'aération de l'ensemble stator et rotor en plus des forces
des extrémités des noyaux. Le modèle illustré à la figure
3C recèle toutefois des caractéristiques bien particulières.
Bien que les appareils construits sur le modèle de la
figure 3 B puissent posséder deux centres magnétiques,
cet effet est encore plus marqué dans les moteurs conçus
avec des prises d’air radiales non alignées. L’occurrence
de deux centres dépend de facteurs tels que l’espacement
des prises d’air et les variantes dimensionnelles de
fabrication. Lorsque cette condition relève de la conception
et du degré de précision de fabrication du moteur, on peut
rapidement procéder à une vérification. Si un moteur
fonctionne désaccouplé et à vide, il semblera prendre une
position statique. Par contre, si le rotor se trouve déplacé
axialement dans la bonne direction par une force
extérieure, il demeurera à cet endroit sans regagner sa
position initiale. Ces deux centres se retrouveront parfois
dans les limites du jeu axial mécanique de l’appareil. Les
machines qui présentent cette caractéristique possèdent
généralement un centre de moindre force que celui d’une
version qui comporte un seul centre magnétique.
Un ensemble qui produit ces deux centres est illustré à la
figure 4 A. Pour les besoins de la discussion, on peut
présumer que cet ensemble a été fabriqué de cette façon
plutôt que conçu volontairement comme tel. La figure 4 A
montre le modèle à sa position de centre mécanique. À
des valeurs dimensionnelles particulières, ce moteur
pourrait venir prendre une position de centre magnétique
qui correspond à celle illustrée aux figures 4 B ou 4 C
lorsqu’il sera mis sous tension. Dans une position comme
dans l’autre, la somme des forces magnétiques qui
agissent vers la droite ou vers la gauche en raison des
extrémités de noyaux et des conduits individuels de
l'ensemble stator et rotor sera égale à zéro, ce qui indique
qu’un point neutre magnétique a été trouvé.
CENTRES RENFORCÉS
Afin de renforcer le centre magnétique relativement faible
des moteurs bipolaires et de minimiser les doubles centres
magnétiques des versions à plus basse vitesse et à prises
d’air du stator et du rotor non alignées, on peut ajouter à
l’appareil une ou plusieurs prises d’air « factices ».
Chacune de ces fausses prises d’air est disposée
exactement à l’opposé d’une prise d'air du stator. Par
contre, ces ajouts ne comportent aucune ouverture
d’alimentation axiale et ne créent pas de passage
d’aération radial supplémentaire. Leur unique fonction
consiste à venir simuler une prise d’air du rotor en regard
d’une prise d'air du stator dans le but de renforcer le centre
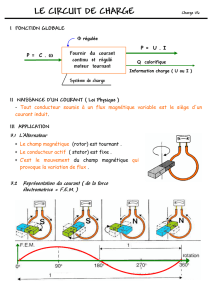
magnétique. La figure 5 présente un exemple de ce genre
de dispositif.
Dans le cas des rotors mécano-soudés dont les barres
sont insérées dans chacune des encoches, l’intégration
d’une prise d’air « factice » est facilement réalisable. Les
barres sont en quelque sorte disposées à partir du
diamètre extérieur du noyau de rotor, ce qui permet un
travail d’usinage.
A
Stator
C
IMAGE 4: DOUBLE CENTRE MAGNÉTIQUE
Rotor
Dans le centre mécanique tel que construit.
B
Premier centre magnétique, rotor bouge vers la gauche
Stator
Rotor
Deuxième centre magnétique, rotor bouge vers la droite
Stator
Rotor

Fiche technique no. 15 Quelques facettes des effets du centrage magnétique
TN 15-5
(Mise-à -jour - 10/03)
Pour les rotors en aluminium moulé, l’ajout d’une telle
prise présente certaines difficultés imputables à la
petitesse de la forme et à l’usinage pratiqué dans les
barres en aluminium moulé. Il est possible de surmonter
ces difficultés en concevant cette prise de la même
manière qu’une prise d’air normale pratiquée en
profondeur radiale, mais en obturant l’ouverture
d’alimentation axiale.
En général, une fausse prise d’air est d’une profondeur
approximative de 2 mm (0,075 po) et de même largeur que
la prise de stator correspondante.
EFFET DE LA CHARGE SUR LE CENTRE
MAGNÉTIQUE
En mode de fonctionnement à vide, la question réside
dans l’orientation des extrémités de chacune des
laminations du rotor et du stator. Si le rotor est oblique, ce
facteur a peut d’effet en l’absence de charge étant donné
la faiblesse des courants dans la cage du rotor. En charge,
tant le facteur de l'inclinaison (en raison des encoches
obliques) que le facteur des bagues d'extrémité entrent en
jeu. L’amplitude de la force axiale exercée en raison de
l'inclinaison est directement proportionnelle au couple et à
l’angle d'inclinaison et inversement proportionnelle au
diamètre du noyau de rotor. La direction de cette force est
solidaire de celle de l'inclinaison et du sens de rotation du
rotor.
Lorsque ces deux composantes se manifestent, que
leur amplitude se révèle suffisante et que leur direction est
appropriée, elles peuvent modifier la position du centre
magnétique occupée par le rotor en fonctionnement à vide.
Normalement, ce changement de position est de moins de
3 mm ( po). Si la zone neutre magnétique à vide se
trouve très près de la position de la zone neutre
mécanique et que le jeu axial total est de l'ordre de 13 mm
(0,5 po), ce déplacement n’occasionnera pas de frottement
de la surface du palier contre l'embase de d’arbre qui lui
correspond. La composante de la force axiale attribuable à
l'inclinaison peut être éliminée dans un rotor en aluminium
moulé par un biais en chevron. Les laminations en biais
sont toujours présentes afin de supprimer les harmoniques
d'encoches et de réduire les pointes de la courbe
vitesse-couple du moteur.
Toutefois, par une disposition semblable à celle illustrée
à la figure 6, la composante axiale de cette force se voit
annulée. L’utilisation d’un biais en chevron est fréquente
dans les moteurs à faible bruit de certaines applications
militaires.
Il est à noter que la marque du centre magnétique tracée
sur le bout d'arbre est effectuée à vide.
VALEURS DE FORCE DU CENTRE MAGNÉTIQUE
Un éventail de moteurs bipolaires, dont la puissance
variait de 300 à 1 750 HP (225 à 1 300 kW) a servi à
calculer la force de rétablissement du centre magnétique
nécessaire pour compenser le déplacement axial en
pouces en fonctionnement au point neutre. Aucune prise
d’air de rotor n’a été utilisée et les noyaux de stator et de
rotor étaient d'une longueur brute égale et on a présumé
que toutes les surfaces des bords étaient parfaitement
alignées pour obtenir un point neutre magnétique ou un
déplacement zéro. Aussi, aucun compte n'a été tenu de
la force de l'inclinaison afin d’effectuer les calculs en
mode à vide. De cette manière, seuls les effets aux
extrémités des laminations sont pris en considération.
Les données ainsi obtenues figurent au Tableau 1. La
particularité du centre magnétique faible des moteurs
bipolaires est manifeste. On note également que la force
de rétablissement ne change pas de façon significative
dans le cas des moteurs plus puissants. Si l’on en
dressait le plan, les données sembleraient décrire une
courbe de saturation à vide.
En se servant de plusieurs différences aux extrémités
de l'empilement plutôt que d’un alignement parfait des
extrémités des noyaux, on peut démontrer que la
véritable force de rétablissement du centre magnétique
sera moindre que celle indiquée dans le Tableau 1. Ainsi,
les variations de fabrication par rapport à une tolérance
zéro aboutiraient à des forces de rétablissement réelles
d’une certaine manière plus faibles que celles des
calculs présentés. À partir de là, il s’avère aussi permis
d’affirmer que les moteurs construits (avec un certain
degré de variation dimensionnelle par rapport à une
symétrie parfaite) selon la figure 2 B offriront des forces
de rétablissement plus faibles que celles des versions
construites sur le modèle de la figure 2 C dotées des
mêmes imperfections d’alignement.
IMAGE 5 : FAUX ÉVENT DANS LE ROTOR
Trous d’alimentation d’air sur l’axe
aux évents du rotor
Conduits de ventilation
radiaux
p
our
rotor
normal
Faux évent (dummy) de .075 po (2 mm) de profondeur pour centrage magnétique.
La largeur du faux évent est égal à la largeur de l’évent de l’induit.
 6
6
1
/
6
100%